Hem
>
Produkter > Laseravståndsmätarmodul > 905nm Laser Range Finder Module > 2 km Micro Laser Avståndsmätare Modul





2 km Micro Laser Avståndsmätare Modul
STA-D20X miniatyrlaseravståndsmodul använder en 905nm halvledarlaser, som har egenskaperna lång räckvidd, låg strömförbrukning, liten storlek och ögonsäkerhet. Det är mycket lämpligt för att integrera små obemannade flygfordon, handhållna mörkerseendeanordningar, värmebilder och annan utrustning.
Skicka förfrågan
Produktbeskrivning
Max räckvidd: 2000m
Avståndsnoggrannhet: ± 1m
Avståndsfrekvens: Engångsavstånd, 1Hz, 2Hz
Vikt: 10g ±0,5g
Nyckelfunktioner:
Halvledarlaserteknik: Överlägsen tillförlitlighet, kompakthet och lägre strömförbrukning än traditionella avståndsmätare för flygtid (TOF), vilket möjliggör integration i bärbara och utrymmesbegränsade enheter.
Produktens prestandaindex
| Serienummer | Projektnamn | STA-D20X |
| 1 | Människans ögonsäkerhet | Ja |
| 2 | Laservåglängd | 905 nm |
| 3 | Laser divergensvinkel | 1×6mrad |
| 4 | Mottagande synfält | ~20mrad |
| 5 | Sändarkaliber | Φ10×7,5 mm |
| 6 | Mottagande kaliber | Φ15×10 mm |
| 7 | Räckvidd | 5~2000m |
| 8 | Varierande noggrannhet | ±1m |
| 9 | Mätfrekvens | Enkelbildsavstånd, 1Hz, 2Hz |
| 10 | Noggrannhetsgrad | ≥98 % |
| 11 | Falskt larmfrekvens | ≤1 % |
| 12 | Datagränssnitt | UART(TTL_3.3V) |
| 13 | Matningsspänning | DC 3~5V |
| 14 | Energiförbrukning | Standby: ≤0,6W@3,3V;Arbete: ≤1W@3,3V; |
| 15 | ||
| 16 | Vikter | 10±0,5 g |
| 17 | Storlek (L×B×H) | ≤26×25×13,5 mm |
| 18 | Driftstemperatur | -20~~60℃ |
| 19 | Förvaringstemperatur | -30~~60℃ |
| 20 | Chock | 1200g, 1ms |
| 21 | Vibration | 5~50~5Hz, 1 oktav/min, 2,5g |
| 22 | Pålitlighet | MTBF≥1500h |
| 23 | Uppstartstid | ≤200ms; |
| 24 | Elektriskt gränssnitt | Sockel: 0,8WTB-6AB-01Plug: 0,8WTB-6Y-2 |
1200g, 1ms
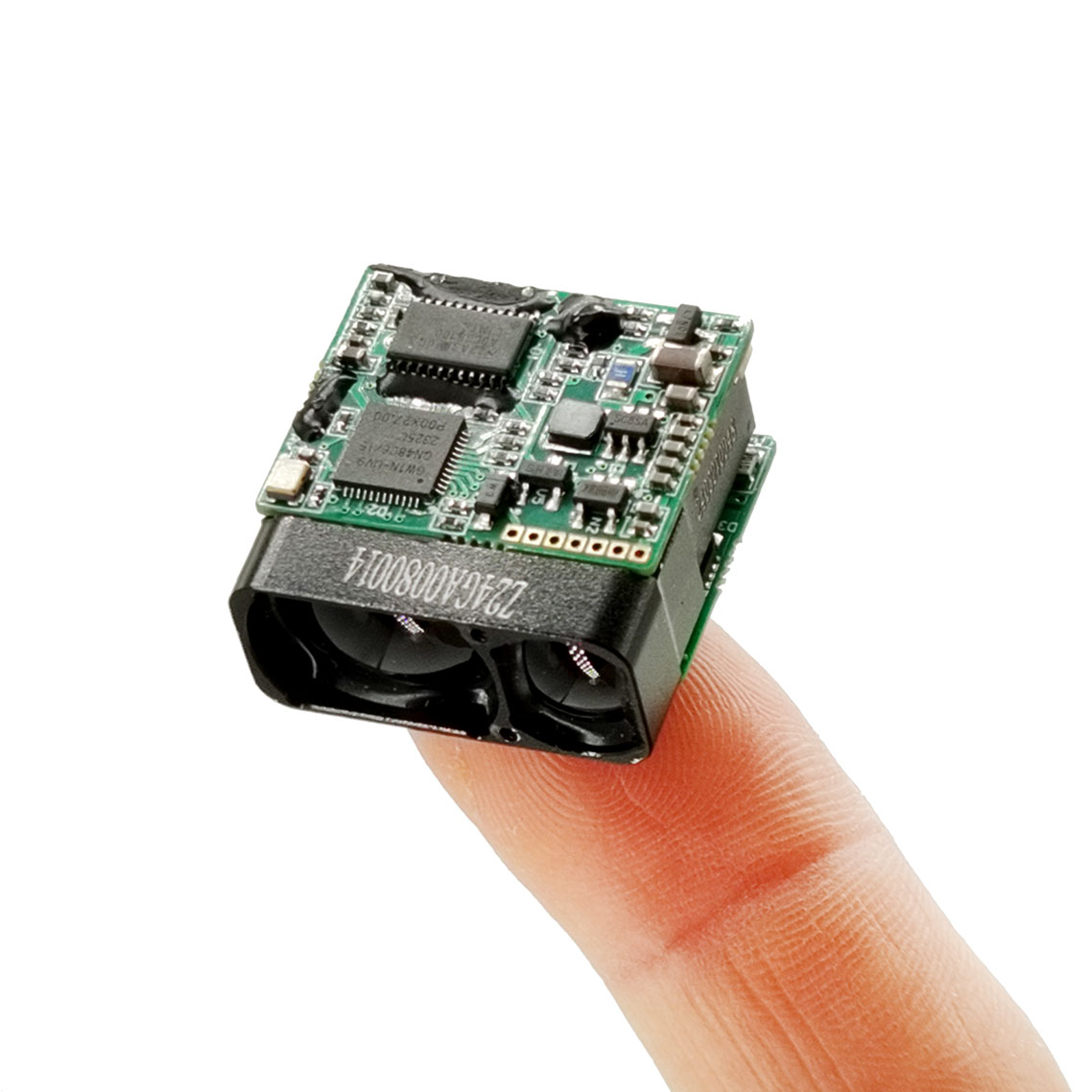
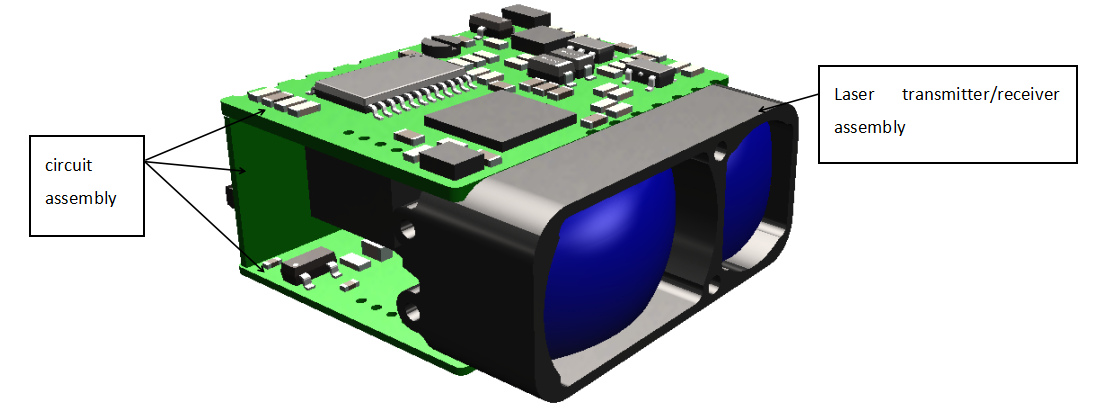
Huvudkomponenterna i laseravståndsmätarprodukten är följande:
a) Mottagning och sändning av komponenter;
b) Kretskomponenter;26mm×25mm×13,5mm(L×B×H),vikten är ≤10g±0,5g, och dess utseende visas i Fig.1.
Figur 1 Produktens utseende
Strukturinstallationsgränssnitt
De yttre dimensionerna för de mekaniska och optiska gränssnitten visas i figur 2.
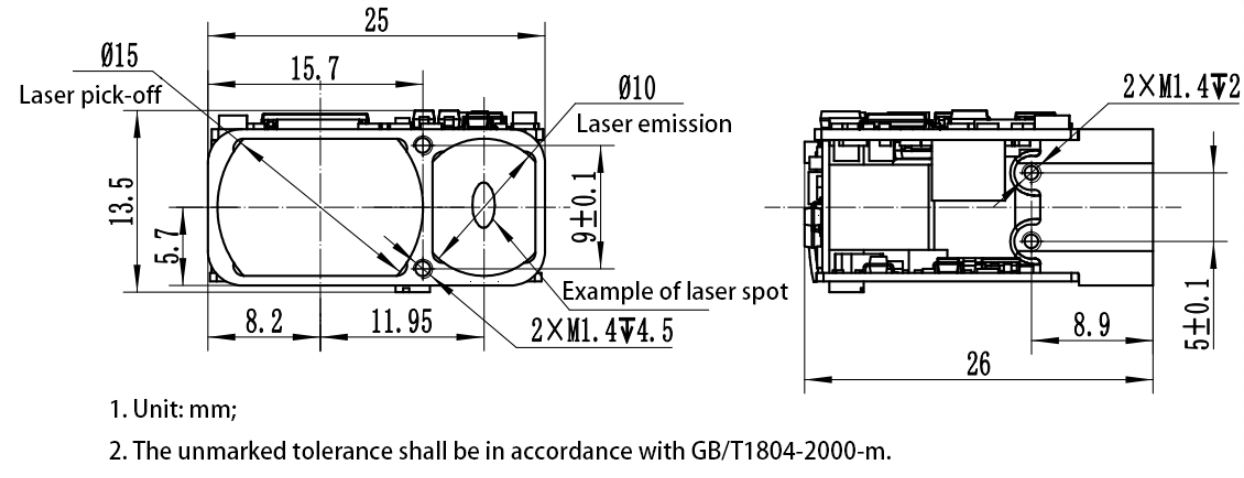
Figur 2 Mekaniskt och optiskt gränssnittsdiagram
Elektriskt gränssnitt
Kraven på det elektriska gränssnittet är följande:
De yttre dimensionerna för de mekaniska och optiska gränssnitten visas i figur 2.
b) Strömförbrukning i standbyläge: ≤ 0,8W;
c) Genomsnittlig strömförbrukning: ≤ 1W;
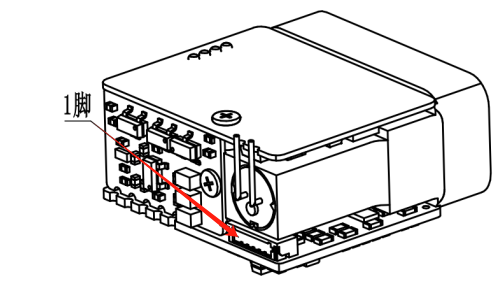
d) Den övre datoränden uppnår tvärbindningstestning med avståndsmätmaskinens ände 0,8WTB-6AB-01-kontakt (Yueqing Huabao) genom 0,8WTB-6Y-2-kontakten. Definitionerna av strömförsörjnings- och kommunikationsportstiften på avståndsmätaränden visas i tabell 1, och kontaktstiftens positioner visas i figur 3.
Tabell 2 Definition av produktens elektriska stift
| Stift | kontrollera koden | Definition av elektriska egenskaper | Signalriktning |
| 1 | Power-EN | ||
| 2 | TTL_RXD | Signalingångsport | Värddator till avståndsmätare |
| 3 | TTL_TXD | Signalutgångsport | Avståndsmätare till värddator |
| 4 | NC | ||
| 5 | Strömförsörjning+ | ||
| 6 | GND |
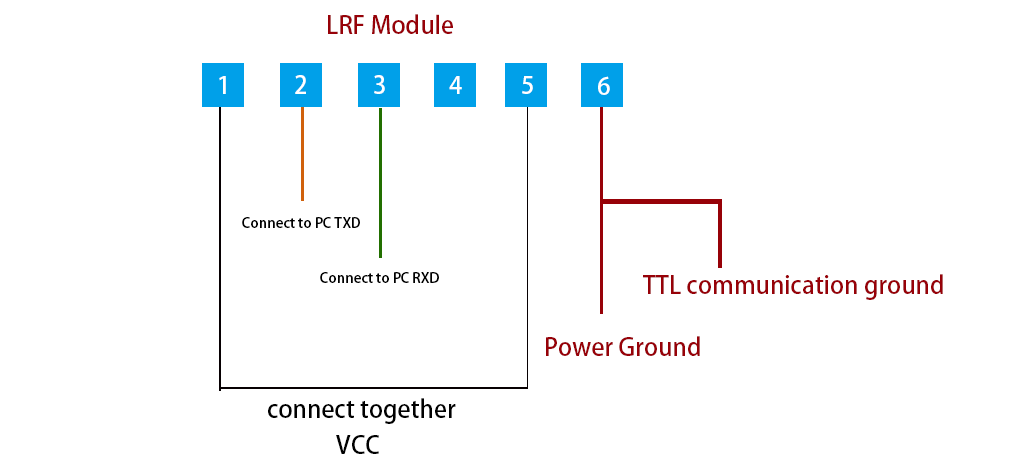
Elektriskt anslutningsdiagram
Modulkommunikation
Data
u Baudhastighet: 115200bps;
u Enkelbyte-överföringsformat: inklusive 1 startbit, 8 databitar, ingen kontroll, 1 stoppbit, 8-bitars data överförs först i låg och sedan i hög;
Protokoll
Enkelt avståndskommando
Obs: Skicka verifieringskoden = byte 3 + byte 4 + byte 5 + byte 6 + byte 7;
Mottagen verifieringskod = byte 1 + byte 2 + byte 3 + byte 4 + byte 5 + byte 6 + byte 7.
Skicka till avståndsmodulen
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskrivning | 0x55 | 0xAA | 0x88 | 0xFF | 0xFF | 0xFF | 0xFF | kontrollera koden |
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskrivning | 0x55 | 0xAA | 0x88 | status | 0xFF | DATA_H | DATA_L | kontrollera koden |
Status=0, enstaka mätning misslyckas; DATA_H=0xFF, DATA_L=0xFF; status=1, enstaka mätning lyckas; DATA_H=hög byte av mätresultat; DATA_L=låg byte av mätresultat.
Kontinuerligt avståndskommando
Obs: Skicka verifieringskoden = byte 3 + byte 4 + byte 5 + byte 6 + byte 7;
Mottagen verifieringskod = byte 1 + byte 2 + byte 3 + byte 4 + byte 5 + byte 6 + byte 7.
Skicka till avståndsmodulen
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskrivning | 0x55 | 0xAA | Frekv | 0xFF | 0xFF | 0xFF | 0xFF | kontrollera koden |
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskrivning | 0x55 | 0xAA | Frekv | status | 0xFF | DATA_H | DATA_L | kontrollera koden |
Status=0, kontinuerlig mätning misslyckas; DATA_H=0xFF, DATA_L=0xFF; status=1, kontinuerlig mätning lyckas; DATA_H=hög byte av mätresultatet; DATA_L=låg byte av mätresultatet.
Freq=0x89,1Hz för avstånd; Freq=0xA9,2Hz för avstånd; Freq=0xB9,5Hz för avstånd; Freq=0xF9 för axelkalibreringsläge (axelstatus skickas tillbaka en gång efter mottagande av axelkalibreringsinstruktionen).
Sluta mäta
Skicka till avståndsmodul:
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskrivning | 0x55 | 0xAA | 0x8E | 0xFF | 0xFF | 0xFF | 0xFF | kontrollera koden |
Avståndsmodulen returnerar:
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskrivning | 0x55 | 0xAA | 0x8E | status | 0xFF | 0xFF | 0xFF | kontrollera koden |
Status=0, den kontinuerliga mätningen kunde inte avslutas; status=1, den kontinuerliga mätningen lyckades avslutas.
Obs: Datan returneras i hexadecimal form, och alla dataresultat kommer att matas ut genom att multiplicera den verkliga datan med 10;
Exempel: dist=2000.3m, utdata är 20003, som omvandlas till hexadecimal som 4E23, det vill säga Data1=0x4E och Data2=0x23.
Hot Tags: 2 km mikrolaseravståndsmätare, tillverkare, leverantörer, fabrik, Kina, tillverkad i Kina, kundanpassad, hög kvalitet
Relaterad kategori
905nm Laser Range Finder Module
1535nm Laser Range Finder Module
1570nm Laser Range Finder Module
1.54UM Laser RangeFinder -modul
1064NM LASER TARGE DESITITATOR
Anti Drone StStem -modul
Ranging Lidar Module
Skicka förfrågan
Lämna gärna din förfrågan i formuläret nedan. Vi kommer att svara dig inom 24 timmar.





")