Hem
>
Produkter > Laseravståndsmätarmodul > Ranging Lidar Module > 100Hz 10m ToF Single-point Ranging Lidar Module





100Hz 10m ToF Single-point Ranging Lidar Module
Laseravståndsradarn STA-B10X är en ny laseravståndsmodul som lanserats av vårt företag för områden som drönare, golvrengöringsrobotar och industrirobotar. Denna produkt är baserad på DTOF-principen (Direct Time Of Flight) och har liten storlek, låg kostnad, stabil prestanda och stark motståndskraft mot ljusstörningar. Produkten är lätt att använda, flexibel att installera och har en kommunikationskommandouppsättning och en övre dator, vilket gör den bekväm för sekundär utveckling och mycket kostnadseffektiv.
Skicka förfrågan PDF-nedladdning
Produktbeskrivning
Drönarhöjdkontroll och undvikande av hinder
Undvikande av robothinder
Ljusridå av industriell kvalitet
Undvikande av AGV/UAV-hinder
Höghastighetsmätning och säkerhetsövervakning inom områdena transport och industriell automation
Undvikande av robothinder
Ljusridå av industriell kvalitet
Undvikande av AGV/UAV-hinder
Höghastighetsmätning och säkerhetsövervakning inom områdena transport och industriell automation
Detaljerade parametrar för produkten
| Ordernummer | Modell | STA-B10X |
| 1 | Rangering | 0,03-5 m (10 % reflektivitet), 0,03-10 m (90 % reflektivitet) |
| 2 | Range hål | 3 cm |
| 2 | Avståndsfrekvens | 100Hz |
| 3 | Varierande noggrannhet | 1 % |
| 4 | Repeterbarhet precision | ±10 mm |
|
|
Upplösningsförhållande | 1 mm |
| 5 | Miljöbeständighet mot ljus | 100K Lux |
| 6 | Laservåglängd | 905 nm |
| 7 | Lasernivå | Klass 1 |
| 8 | Fältvinkel | 3° |
| 9 | Ange laservåglängden | N/A |
| 10 | Ange lasernivå | N/A |
| 11 | Ingångsspänning | 3,3V |
| 12 | Topppunktsström | N/A |
| 13 | Medelström | N/A |
| 14 | Genomsnittlig strömförbrukning | 0,4W |
| 15 | Kommunikationsläge | UART TTL |
| 16 | Nivåer av skydd | N/A |
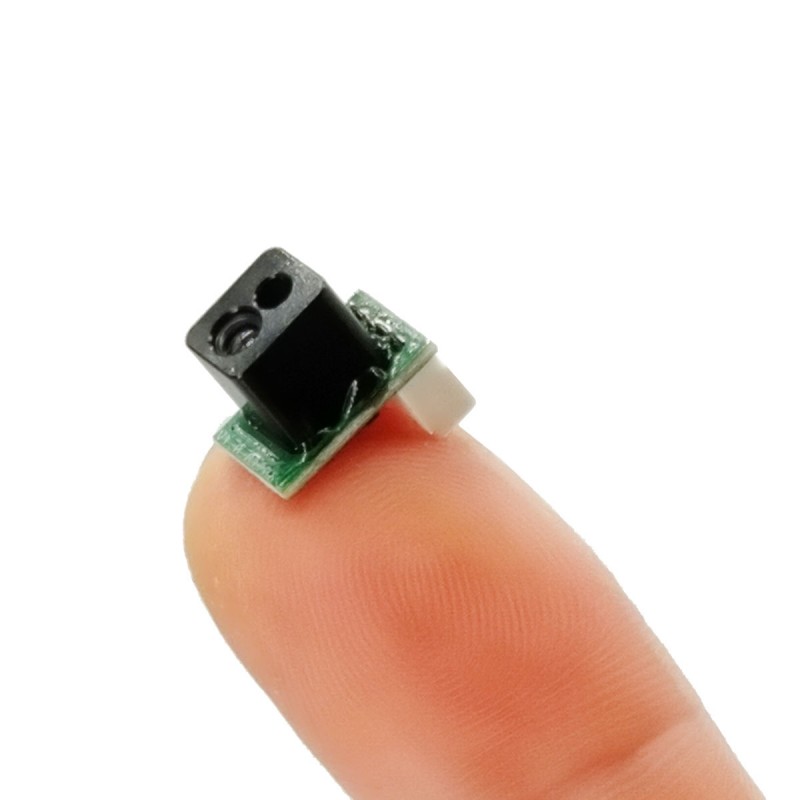
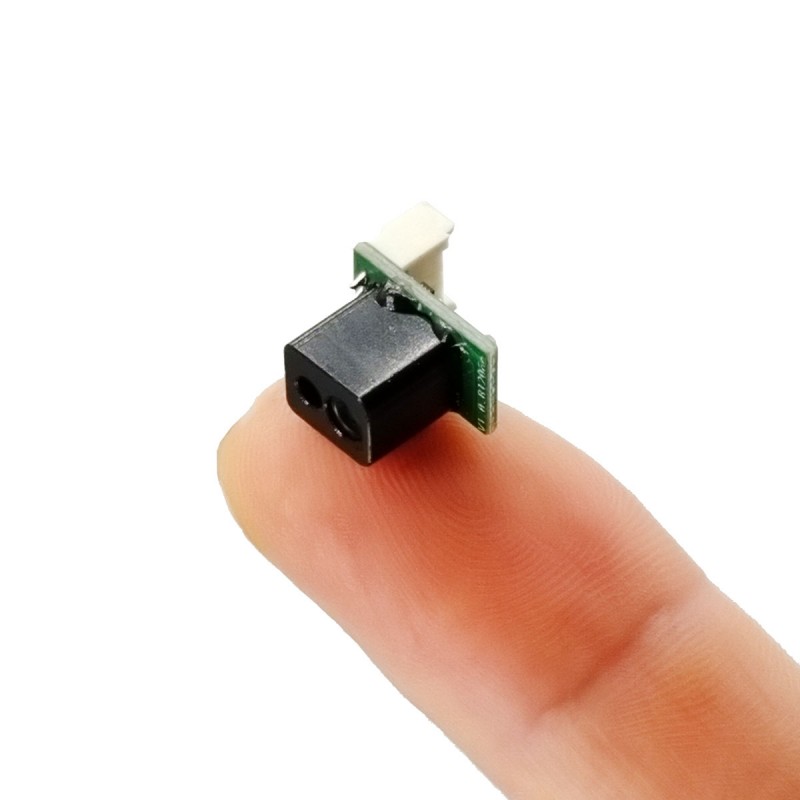
| 17 | Storlek (längd x bredd x höjd) | 12x9x8,5 mm |
| 18 | Vikt | 1g |
| 19 | Arbetstemperatur | -30℃~+65℃ |
| 20 | Kabelspecifikationer | 4-stift 1,25 mm terminal, 10 cm förtennad lös tråd |
| 21 | サイズ(長さ×幅×高さ) | Stöder anpassning av extern struktur, inspänning och utgångsprotokoll |
Pin definition

|
||
| stift | Definiera / Trådfärg | Gräns-snittet |
| 1 | TX (röd) | RX |
| 2 | RX (svart) | TX |
| 3 | GND (gul) | Strömförsörjning - |
| 4 | 3,3V (grön) | Strömförsörjning + |
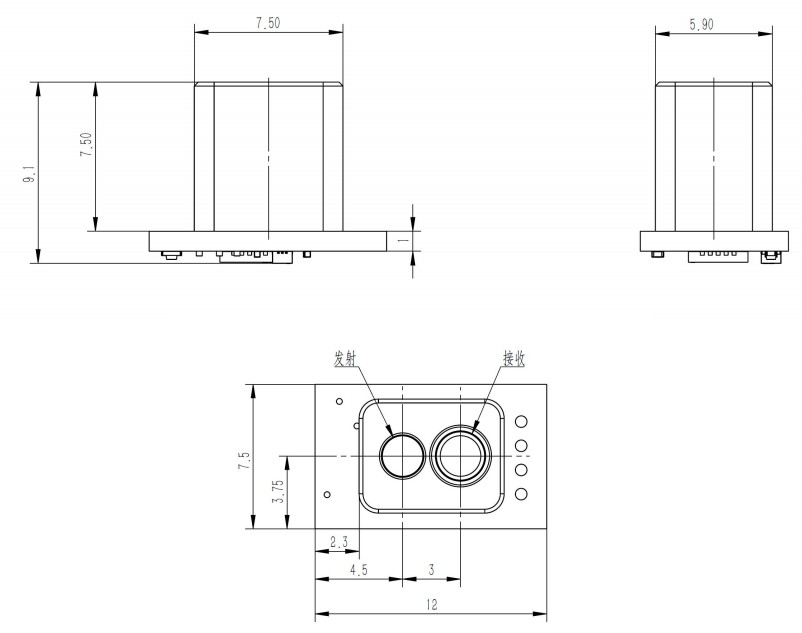
Modulstorlek
Kommunikationsprotokoll
Kommunikationsgränssnitt
| UART | |
| Standardvärde | 460800 (justerbar) |
| databit | 8 |
| stopp bit | 1 |
| jämn-udda check | Rangering |
Utdataformat
Avståndsmätmodulens aktiva utdata efter påslagning (4 byte data i en ram), utdata 65535 när det inte kan mätas
Exempel: 5C 02 11 EC
5C: fast ramhuvud 1 byte
02 11: två byte för att indikera att mätavståndet på 4354 mm, den lilla änden av läget, intervallet 0-65535 mm
EC: från början av 02:an till slutet av 11:an, för att göra summeringen av kontrollsumman för att ta inversen av enbyten
Kontrollsummafunktion: (börjar från den andra byten till slutet av den näst sista byten, summering och invertering)
uint8_t Check_Sum(uint8_t *_pbuff, uint16_t _cmdLen)
{
uint8_t cmd_sum=0;
uint16_t i;
för(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
cmd_summa = (~cmd_summa);
returnera cmd_summa;
}
Exempel: 5C 02 11 EC
5C: fast ramhuvud 1 byte
02 11: två byte för att indikera att mätavståndet på 4354 mm, den lilla änden av läget, intervallet 0-65535 mm
EC: från början av 02:an till slutet av 11:an, för att göra summeringen av kontrollsumman för att ta inversen av enbyten
Kontrollsummafunktion: (börjar från den andra byten till slutet av den näst sista byten, summering och invertering)
uint8_t Check_Sum(uint8_t *_pbuff, uint16_t _cmdLen)
{
uint8_t cmd_sum=0;
uint16_t i;
för(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
cmd_summa = (~cmd_summa);
returnera cmd_summa;
}
Försiktighetsåtgärder för användning
- Produkten har inte omvänd anslutning och överspänningsskydd, följ specifikationen för korrekt strömförsörjning och kabeldragning
- Produktlasern är klass 1, titta inte direkt på linsen efter att produkten har slagits på
- Vid användning i dammig miljö rekommenderas det att lägga till en röd genomskinlig glas- eller akrylpanel utanför produktens lins (med en transmittanshastighet på minst 85 % vid våglängdsbandet 905nm)
- När du kontaktar produkten, använd antistatiska handskar för att undvika att produkten går sönder
- Produkten kommer inte att vara effektiv vid mätning av Risk för fel vid mätning av starkt reflekterande föremål (t.ex. 3M-tejp), speglar, etc.
- Produktlasern är klass 1, titta inte direkt på linsen efter att produkten har slagits på
- Vid användning i dammig miljö rekommenderas det att lägga till en röd genomskinlig glas- eller akrylpanel utanför produktens lins (med en transmittanshastighet på minst 85 % vid våglängdsbandet 905nm)
- När du kontaktar produkten, använd antistatiska handskar för att undvika att produkten går sönder
- Produkten kommer inte att vara effektiv vid mätning av Risk för fel vid mätning av starkt reflekterande föremål (t.ex. 3M-tejp), speglar, etc.
Hot Tags: 100Hz 10m ToF Single-point Ranging Lidar Module, Tillverkare, Leverantörer, Fabrik, Kina, Tillverkad i Kina, Anpassad, Hög kvalitet
Relaterad kategori
905nm Laser Range Finder Module
1535nm Laser Range Finder Module
1570nm Laser Range Finder Module
1.54UM Laser RangeFinder -modul
1064NM LASER TARGE DESITITATOR
Anti Drone StStem -modul
Ranging Lidar Module
Skicka förfrågan
Lämna gärna din förfrågan i formuläret nedan. Vi kommer att svara dig inom 24 timmar.