Hem
>
Produkter > Fiberoptisk gyro > Fiberoptiskt gyroskop > Fiberoptiskt gyroskop Dimmembran Tröghetsmätenhet





Fiberoptiskt gyroskop Dimmembran Tröghetsmätenhet
JIO-MC200-IMU är en mikromekanisk teknologi (MEMS) baserad tröghetsmätningsenhet (IMU) med ett inbyggt högpresterande MEMS-gyro och MEMS-accelerometer som matar ut 3-axlig vinkelhastighet och 3-axlig acceleration. Välkommen att köpa Fiber Optic Gyroscope Fog Mems Tröghetsmätenhet från oss.
Modell:JIO-MC200-IMU
Skicka förfrågan
Produktbeskrivning
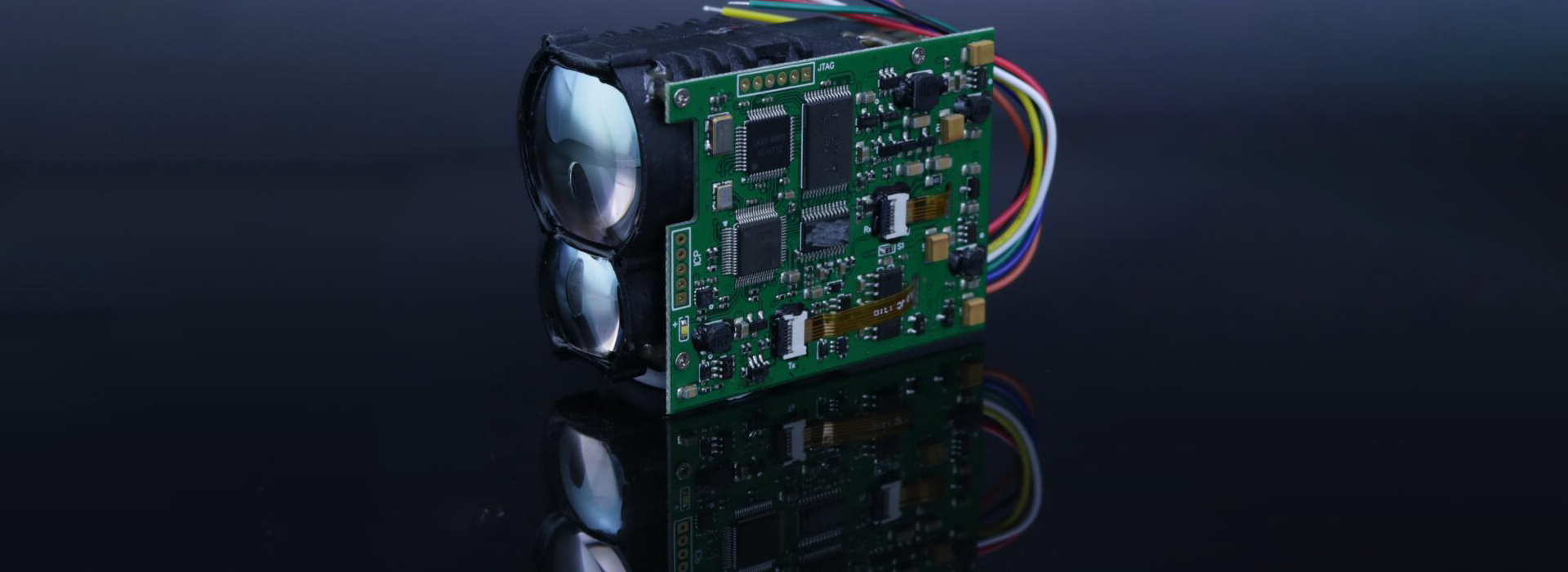
Fiberoptiskt gyroskop Dimmembran Tröghetsmätenhet Översikt
JIO-MC200-IMU är en mikromekanisk teknologi (MEMS) baserad tröghetsmätningsenhet (IMU) med ett inbyggt högpresterande MEMS-gyro och MEMS-accelerometer som matar ut 3-axlig vinkelhastighet och 3-axlig acceleration.
JIO-MC200-IMU har utmärkt sexuell och miljömässig anpassningsförmåga. Genom att matcha olika programvaror kan produkterna användas i stor utsträckning i guidad ammunition, taktiska och industriella UAV:er, obemannade flygfarkoster, sökare, bilautonom körning.
JIOPTICS installation av fiberoptiska gyroskop för att ge enkel integration flexibilitet, och våra utvecklare verktygslåda för snabb prototyping, inte bara uppfylla specifikationskraven, ger också högkvalitativ prestanda möta efterfrågan från slutanvändare.
JIO-MC200-IMU har utmärkt sexuell och miljömässig anpassningsförmåga. Genom att matcha olika programvaror kan produkterna användas i stor utsträckning i guidad ammunition, taktiska och industriella UAV:er, obemannade flygfarkoster, sökare, bilautonom körning.
JIOPTICS installation av fiberoptiska gyroskop för att ge enkel integration flexibilitet, och våra utvecklare verktygslåda för snabb prototyping, inte bara uppfylla specifikationskraven, ger också högkvalitativ prestanda möta efterfrågan från slutanvändare.
Våra tjänster
JIOPTICS är ett professionellt och effektivt team. Tillhandahåll OEM/ODM-tjänster åt dig, kontakta oss för att skräddarsy ditt exklusiva fiberoptiska gyroskop
Produktfunktioner
x
a) ±450º/s dynamiskt mätområde;
b) Nollförspänningsstabilitet: 20°/h (GJB,10S);
2) Tre-axlig digital accelerometer:
a)±16g dynamiskt mätområde;
b) Noll bias stabilitet: 0,5 mg (GJB, 10S);
3)Hög tillförlitlighet: MTBF
4) Fullt temperaturområde (-40â~70â) för att säkerställa noggrannhet: inbyggd högpresterande temperaturkalibrering och kompensationsalgoritm;
5) Lämplig för arbete under starka vibrationsförhållanden;
6) Gränssnitt 1-vägs UART
a) ±450º/s dynamiskt mätområde;
b) Nollförspänningsstabilitet: 20°/h (GJB,10S);
2) Tre-axlig digital accelerometer:
a)±16g dynamiskt mätområde;
b) Noll bias stabilitet: 0,5 mg (GJB, 10S);
3)Hög tillförlitlighet: MTBF
4) Fullt temperaturområde (-40â~70â) för att säkerställa noggrannhet: inbyggd högpresterande temperaturkalibrering och kompensationsalgoritm;
5) Lämplig för arbete under starka vibrationsförhållanden;
6) Gränssnitt 1-vägs UART
Ansökningsfält
1)Guidad ammunition
2) Sökande
3)Taktiska och industridrönare
4) Autopilot
2) Sökande
3)Taktiska och industridrönare
4) Autopilot
Elektriska egenskaper
- Strömförsörjning: bred spänningsingång 12~36V
- Märkeffekt: 24W (max)
- Märkeffekt: 24W (max)
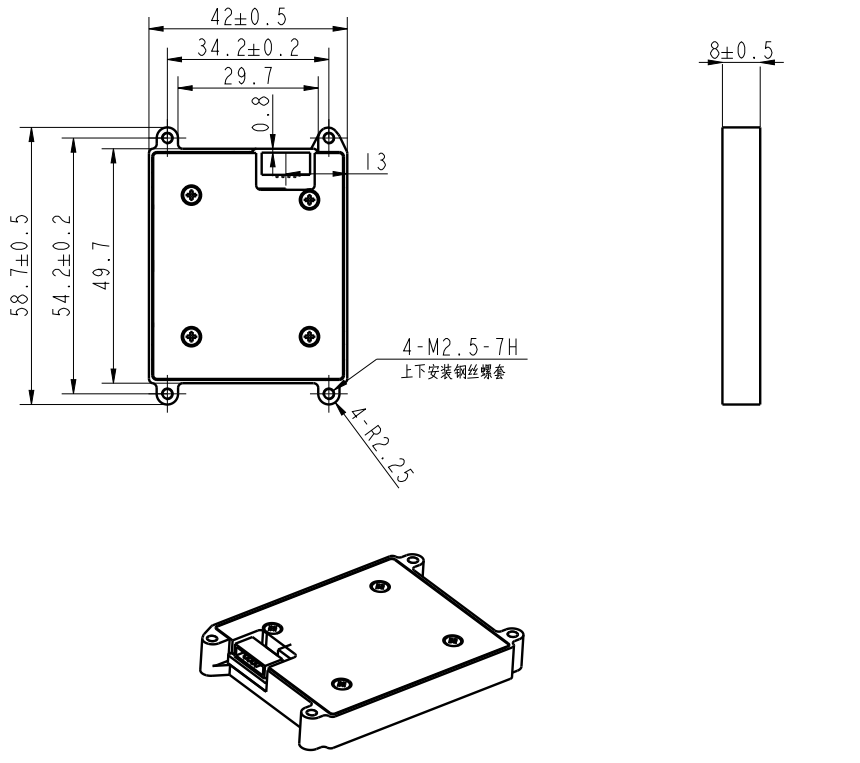
Produktmått
| Parametrar |
Testvillkor |
Minimum |
Typiskt värde |
Maximalt värde |
Enheter |
|
| Gyro |
Dynamiskt mätområde |
|
|
450 |
|
°/s |
| Noll bias stabilitet |
10s medelvärde (-40â~ 70â, konstant temperatur) |
|
20 |
|
°/h. |
|
| Noll partiskhet |
Intervall för noll bias |
|
/ - 0,2 |
|
°/s |
|
| Noll avvikelse â över hela temperaturområdet |
|
/ - 0,1 |
|
°/s |
||
| Repeterbarhet för successiva starter, Z-axel |
|
30 |
|
°/h. |
||
| Effekt av linjär acceleration på nollförspänning |
|
10 |
|
°/h/g |
||
| Vibration â¡ på noll bias effekt, före och efter vibrationsändring |
|
10 |
|
°/h/g |
||
| Vibration â¡ till noll förspänningseffekt, vibration efter vibrationsändring |
|
10 |
|
°/h/g |
||
| Skalfaktor |
Skalfaktorn är icke-linjär |
|
500 |
|
ppm |
|
| Skalfaktornoggrannhet |
|
2000 |
|
ppm |
||
| Bullerdensitet |
|
|
0.003 |
|
° / Hz/s) |
|
| Upplösning |
|
|
3,052 x 10â7 |
|
°/s/LSB |
|
| Accelerometer |
Dynamiskt mätområde |
|
|
16 |
|
g |
| Noll bias stabilitet |
10s medelvärde (-40â~ 70â, konstant temperatur) |
|
0.5 |
|
mg |
|
| Noll partiskhet |
Intervall för noll bias |
|
5 |
|
mg |
|
| Noll avvikelse över hela temperaturområdet |
|
5 |
|
mg |
||
| Successiv start repeterbarhet |
|
0.5 |
|
mg |
||
| Skalfaktor |
Skalfaktorn är icke-linjär |
|
500 |
|
ppm |
|
| Skalfaktornoggrannhet |
|
2000 |
|
ppm |
||
| Bullerdensitet |
|
|
0.05 |
|
Hz/mg) |
|
| Upplösning |
|
|
1,221 x 10â8 |
|
g/LSB |
|
| Övrig |
Starttid |
|
|
2 |
|
s |
| Parametrar |
Testvillkor |
Minimum |
typisk |
värde |
maximalt värde |
enheter |
| egenskaper |
Bandbredd |
|
|
200 |
|
Hz |
| Dröjsmål |
|
|
10 |
|
Fröken |
|
| Kommunikationsgränssnitt |
1-vägs UART |
Baudhastighet |
|
460.8 |
|
Kbps |
| Samplingsfrekvens |
UART |
|
500 |
|
Hz |
|
| Elektriska egenskaper |
Spänning |
|
4.8 |
5 |
5.2 |
V |
| Energiförbrukning |
|
|
1.5 |
|
W |
|
| Krusning |
P-P |
|
100 |
|
mV |
|
| Strukturella egenskaper |
Storlek |
|
|
58,7 x 42 x 8 |
|
mm |
| Vikt |
|
|
35 |
|
g |
|
| Användningsmiljö |
Driftstemperatur |
|
- 40 |
|
70 |
℃ |
| Förvaringstemperatur |
|
- 45 |
|
75 |
℃ |
|
| Vibration |
|
|
20 till 2000Hz, 6,06g |
|
|
|
| Påverkan |
|
|
500 g |
|
|
|
| Användningsmiljö |
MTBF |
|
|
20000 |
|
h |
| Kontinuerlig arbetstid |
|
|
120 |
|
h |
|
| â : Beräkna nollavvikelsen för hela temperaturvariationsprocessen, temperaturvariationshastighet â¤1â/min, temperaturområde -40â~ 70â; â¡ : vibrationsförhållandena är 6,06 g, 20Hz~2000Hz |
||||||
Elektriskt gränssnitt
Kontakttyp: A1251WR-S-4P;
Anslutningspunkterna definieras i följande tabell:
Anslutningspunkterna definieras i följande tabell:
| Pins |
Definition |
Funktioner |
Anmärkningar |
|
1 |
5V |
Dc strömingång |
|
|
2 |
GND |
till |
|
|
3 |
TX LV-TTL |
Seriell portsändning |
3,3 V |
|
4 |
RX LV-TTL |
Seriell portmottagning |
3,3 V |
Mjukvarugränssnitt
Baudhastighet: 460800bps;
Sändningsfrekvens: 500Hz;
Dataformat: Databit 8, stoppbit 1, ingen paritetsbit;
När data överförs är den låg och sedan hög.
Kommunikationsprotokollen visas i följande tabell:
Sändningsfrekvens: 500Hz;
Dataformat: Databit 8, stoppbit 1, ingen paritetsbit;
När data överförs är den låg och sedan hög.
Kommunikationsprotokollen visas i följande tabell:
| byte |
Data |
Form |
Upplösning |
Anmärkningar |
|
1 |
0x5A |
Uint8 |
|
|
|
2 |
0x5A |
Uint8 |
|
|
| 3-6 |
Vinkelhastighet X |
flyta |
|
|
| 7-10 |
Vinkelhastighet Y |
flyta |
|
|
| 11-14 |
Vinkelhastighet Z |
flyta |
|
|
| 15-18 |
Vinkelhastighet X |
flyta |
|
|
| 19-22 |
Vinkelhastighet Y |
flyta |
|
|
| 23-26 |
Vinkelhastighet Z |
flyta |
|
|
| 27-30 |
Reserverad |
Uint8 |
|
|
|
31 |
Temperatur |
int8 |
1 â |
Område: -128 till 127 |
|
32 |
Och kolla |
Uint8 |
|
1-31 byte summerar och tar 8 bitar lägre |
Strukturellt gränssnitt
Hot Tags: Fiberoptiskt gyroskop dimmembran Tröghetsmätenhet, tillverkare, leverantörer, fabrik, Kina, tillverkad i Kina, kundanpassad, hög kvalitet
Relaterad kategori
Skicka förfrågan
Lämna gärna din förfrågan i formuläret nedan. Vi kommer att svara dig inom 24 timmar.
Relaterade produkter