Hem
>
Produkter > Laseravståndsmätarmodul > 1535nm Laser Range Finder Module > 10 km ögonsäkra laserområdefinder modul (LRF)




")


10 km ögonsäkra laserområdefinder modul (LRF)
STA-B1015X är en mänsklig ögonsäker laseravståndsmätningsmodul, som kan upptäcka målavståndet och överföra det uppmätta avståndet till den övre datorn genom seriekommunikation. Synlighet ≥ 15 km, målreflektion ≥ 0,3, fuktighet ≤ 80%, fordonet 2,3 m × 2,3 m (NATO -mål) varierande avstånd ≥10 km; byggnadsmål max i rangering ≥15 km.
Skicka förfrågan
Produktbeskrivning
Huvudfunktioner
(1) enstaka variation och kontinuerlig variation;
(2) svara på laseravståndskommandon och kan sluta sträcka sig när som helst enligt stoppkommandot;
(3) utgångsavståndsdata och statusinformation en gång per puls under avståndsmätning;
(4) den kan rapportera det kumulativa antalet överförda laserpulser (ingen förlust av kraft);
(5) Val av distans, främre och bakre målindikering;
(6) Självtestfunktion.
(2) svara på laseravståndskommandon och kan sluta sträcka sig när som helst enligt stoppkommandot;
(3) utgångsavståndsdata och statusinformation en gång per puls under avståndsmätning;
(4) den kan rapportera det kumulativa antalet överförda laserpulser (ingen förlust av kraft);
(5) Val av distans, främre och bakre målindikering;
(6) Självtestfunktion.
Produktintroduktion
B1015X Laser RangeFinder -modulen är en Military Pulse Laser RangeFinder designad för applikationsscenarier som flygplan, obemannade flygfordon, tankar och omfattning. Den har liten storlek, lätt vikt, låg effektförbrukning, stabil prestanda, lång mätavstånd och lång livslängd, mänsklig ögonsäkerhet och andra fördelar, det är en viktig teknisk utrustning för att förbättra produktens riktningsnoggrannhet.
Produktprestandaindex för B1015X ögonsäker LRF-modul
| Punkt | Teknisk parameter | Instruktion |
| Modell | STA-B1015X | |
| Arbetsvåglängd | 1535 ± 5nm | |
| Ögonsäkerhet | Klass 1 (IEC 60825-1) | |
| Får bländare | Φ40mm | |
| Utsläppsöppning | Φ14mm | |
| Variationsförmåga | 50m-15 km | |
| Avståndsortiment | ≥18000m | Max Range, Reflectivity: 0,9, Observer Synlighet 25 km |
| ≥15000 m | Byggnadsmål, reflektivitet: 0,6, observatörssynlighet 25 km | |
| ≥10000M | Nato Target | |
| ≥6000 m | Mänsklig mål | |
| ≥2500 m | UAV -mål | |
| Mini | 50 m |
|
| Detektering av flera mål | Upp till 3 mål |
|
| Alltför noggrannhet | ± 1 m | 3D |
| Avståndsfrekvens | 1 ~ 10Hz justerbar |
|
| Noggrannhet | ≥98% |
|
| Falsk larmfrekvens | 1% |
|
| Divergensvinkel | ≤0,3 mad |
|
| Gränssnitt | Rs422 | TTL/RS232 -gränssnitt kan anpassas |
| Spänning | 9 ~ 32V | Ingångsspänning kan anpassas efter krav |
| Arbetskraft | ≤3W (@10Hz) | Normalt temperaturtest |
| Toppmakt | ≤6w | Normalt temperaturtest |
| Mekanisk chock | 75g, 1ms |
|
| Arbetstemperatur | -40 ℃~+60 ℃ |
|
| Lagringstemperatur | -45 ℃~+70 ℃ |
|
| Pålitlighet | MTBF ≥ 1500H |
|
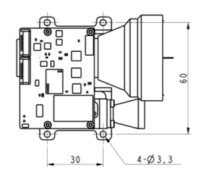
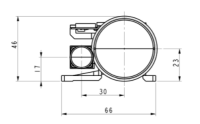
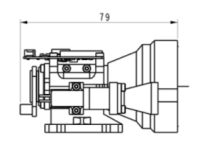
| Storlek | ≤79 × 66 × 46mm |
|
| Vikt | ≤120g |
|
| Huvudfunktion | Först och sista målet varierar, multi-mål, avståndsselektivitet | |
Anmärkningar:
1) Nato -målstorlek 2,3 m × 2,3 m; Mänsklig målstorlek 0,5 m × 1,7 m; UAV -målstorlek 0,2 m × 0,3 m; Reflektivitet 30%, observatörssynlighet ≥ 15 km
Strukturinstallationsgränssnitt
Externt gränssnitt
| Stift | Definition | Fungera | Anteckningar |
| 1 | Rx+ | Rs422 mottagare + | Blå |
| 2 | Rx- | Rs422 -mottagare - | Grön |
| 3 | Tx- | Rs422 växellåda - | Purpur |
| 4 | Tx+ | Rs422 växellåda + | Gul |
| 5 | Gard | Jordtråd | Vit |
| 6 | Vå | Strömförsörjning + | Röd |
| 7 | Gard | Strömförsörjning - | Svart |
| 8 | Pwn och | / | Aska |
Miljöanpassningsbarhet
a) Arbetstemperatur : -40 ℃~+60 ℃.
b) Lagringstemperatur : -45 ℃~+70 ℃.
C) Slumpmässig vibration: 15 ~ 2000Hz, 3 riktningar. De specifika testvillkoren visas i tabell 1.
b) Lagringstemperatur : -45 ℃~+70 ℃.
C) Slumpmässig vibration: 15 ~ 2000Hz, 3 riktningar. De specifika testvillkoren visas i tabell 1.
Tabell 1 Slumpmässiga vibrationstestförhållanden
| Serienummer | Frekvensområde (Hz) | Accelerationspektraldensitet (G2/Hz) | Vibrationstid (min) |
| 1 | 15 ~ 190 | 0.01 | Vibration i alla riktningar 15 min |
| 2 | 190 ~ 210 | 0.1 | |
| 3 | 210 ~ 380 | 0.01 | |
| 4 | 380 ~ 420 | 0.025 | |
| 5 | 420 ~ 2000 | 0.01 |
OEM/ODM -moduler och anpassade lösningar
B1015X är designad för systemintegratorer som letar efter en bekväm, kraftfull och kompakt laseravståndslösning. Det ger tillförlitlig prestanda i ett brett spektrum av applikationer.
Den är mycket liten, ultralätt, har låg effektförbrukning och kan mätas på lång avstånd. Det är lämpligt för handhållna enheter (termisk avbildning), vapenmonteringsapplikationer, bärbara system och lätta sensorsviter och obemannade flygfordon eller UGV: er.
Den är mycket liten, ultralätt, har låg effektförbrukning och kan mätas på lång avstånd. Det är lämpligt för handhållna enheter (termisk avbildning), vapenmonteringsapplikationer, bärbara system och lätta sensorsviter och obemannade flygfordon eller UGV: er.
Protokoll för kommunikation
1. Överföringsprotokoll: asynkron seriekommunikation;
2. Portfrekvens: 115200;
3. Databitar: 10Bits: En startbit, 8 databitar, en stoppbit, ogiltig verifiering;
4. Datastruktur: Data består av rubrikbyte, kommandodel, datalängd, parameterdel och kontrollbyte;
5. Kommunikationsläge: Masterkontrollen skickar kontrollkommandon till den olika maskinen, och den olika maskinen tar emot och kör instruktionerna. I det olika tillståndet skickar den olika maskinen data och status för den olika maskinen tillbaka till den övre datorn enligt den varierade cykeln. Kommunikationsformatet och kommandoinnehållet visas i följande tabell.
A) Huvudkontroll skickas
Formatet för meddelandet som ska skickas är följande:
2. Portfrekvens: 115200;
3. Databitar: 10Bits: En startbit, 8 databitar, en stoppbit, ogiltig verifiering;
4. Datastruktur: Data består av rubrikbyte, kommandodel, datalängd, parameterdel och kontrollbyte;
5. Kommunikationsläge: Masterkontrollen skickar kontrollkommandon till den olika maskinen, och den olika maskinen tar emot och kör instruktionerna. I det olika tillståndet skickar den olika maskinen data och status för den olika maskinen tillbaka till den övre datorn enligt den varierade cykeln. Kommunikationsformatet och kommandoinnehållet visas i följande tabell.
A) Huvudkontroll skickas
Formatet för meddelandet som ska skickas är följande:
| Stx0 | Cmd | Len | Data1h | Data1l | Chk |
Tabell 2 Format Beskrivning av meddelandet som skickas
| ordernummer | namn | förklara | koda | anmärkningar |
| 1 | Stx0 | Meddelande Start Flagg | A5 (H) |
|
| 2 | Cmd | Cw | Se tabell 3 |
|
| 3 | Len | Dl | Antalet av alla byte utom startmärket, kommandordordet och kontrollsummen |
|
| 4 | Datah | parameter | Se tabell 3 |
|
| 5 | ankomst |
|
||
| 6 | Chk | Xor -verifiering | Förutom den giltiga byten är alla andra byte xored |
|
Kommandot beskrivs på följande sätt:
Tabell 3 Beskrivning av kommandon och dataord som skickas av Master till den olika maskinen
Tabell 3 Beskrivning av kommandon och dataord som skickas av Master till den olika maskinen
| ordernummer | Cw | fungera | Data Byte | anmärkningar | längd | Exempelkod |
| 1 | 0x00 | upphöra | Datah = 00 (H) Datal = 00 (H) | RangeFinder slutar mäta | Sex byte | A5 00 02 00 A7 |
| 2 | 0x01 | Enstaka | Datah = 00 (H) Datal = 00 (H) |
|
Sex byte | A5 01 02 00 00 A6 |
| 3 | 0x02 | Kontinuerlig | Datah = xx (H) DATAL = YY (H) | Data beskriver den olika perioden, i MS | Sex byte | A5 02 02 03 E8 4E (1Hz Ranging) |
| 4 | 0x03 | självkontroll | Datah = 00 (H) Datal = 00 (H) |
|
Sex byte | A5 02 02 00 A4 |
| 5 | 0x04 | Ställ in det närmaste avståndet till valet | Datah = xx (H) DATAL = YY (H) | Data beskriver det blinda zonvärdet, enhet 1m | Sex byte | A5 04 02 00 64 C7 (100m är det närmaste avståndet) |
| 6 | 0x06 | Kumulativt antal ljusaffekter | Datah = 00 (H) Datal = 00 (H) | Kumulativt antal ljusaffekter | Sex byte | A5 06 02 00 A1 |
| 7 | 0x11 | APD -strömmen är på | Datah = 00 (H) Datal = 00 (H) |
|
Sex byte | A5 11 02 00 B6 |
| 8 | 0x12 | APD -kraften är av | Datah = 00 (H) Datal = 00 (H) |
|
Sex byte | A5 12 02 00 B5 |
| 9 | 0xeb | Nummerfråga | Datah = 00 (H) Datal = 00 (H) | Nummerfråga | Sex byte | A5 EB 02 00 00 4C |
a) Huvudkontroll får format
Formatet för det mottagna meddelandet är som följer:
Formatet för det mottagna meddelandet är som följer:
| Stx0 | Cmd | Len | Data | Datum0 | Chk |
Tabell 4 Format Beskrivning av mottagna meddelanden
| ordernummer | namn | förklara | koda | anmärkningar |
| 1 | Stx0 | Meddelande Start Flag 1 | A5 (H) |
|
| 2 | Cmd_jg | Datakommandomord | Se tabell 5 |
|
| 3 | Len | Dl | Antalet av alla byte utom startmärket, kommandordordet och kontrollsummen |
|
| 4 | Dn | parameter | Se tabell 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | Xor -verifiering | Förutom den giltiga byten är alla andra byte xored |
|
Huvudkontroll Mottagande statusbeskrivning:
Tabell 5 beskriver dataordet som skickas av RangeFinder till huvudkontrollern
Tabell 5 beskriver dataordet som skickas av RangeFinder till huvudkontrollern
| ordernummer | Cw | fungera | Data Byte | anmärkningar | total längd |
| 1 | 0x00 | upphöra | D1 = 00 (H) D0 = 00 (H) |
|
Sex byte |
| 2 | 0x03 | självkontroll | D8 ~ d1 | D8-D7: -5V-spänning, enhet 0,01V.D6-D5: Blind Spot Value, Enhet 1MD4: APD Högspänningsvärde, enhet V; D3: Koltyp, indikerar APD-temperatur, enhet: Degrees Celsius; D2-D1: +5V-spänning, enhet 0,01V | 12 byte |
| 3 | 0x04 | Avstånd till närmaste åtkomstinställning, enhet M | D1 d0 | Data beskriver det närmaste avståndsvärdet, enhet 1 m; starta högt och slutar låg | Sex byte |
| 4 | 0x06 | Kumulativt antal ljusaffekter | D3 ~ d0 | Data uttrycker antalet lampor, 4 byte, med den höga byte först | Sju byte |
| 5 | 0x11 | APD -strömmen är på | D1 = 00 (H) D0 = 00 (H) | APD -strömmen är på | Sex byte |
| 6 | 0x12 | APD -avstängning | D1 = 00 (H) D0 = 00 (H) | APD -kraften är av | Sex byte |
| 7 | 0xed | Arbetar övertid | 0x00 0x00 | Lasern är under laserarbetsskydd och kan inte mätas. | Sex byte |
| 8 | 0xee | Effektivitetsfel | 0x00 0x00 |
|
Sex byte |
| 9 | 0xef | Seriell portkommunikation timeout | 0x00 0x00 |
|
Sex byte |
| 10 | 0x01 | Mätning av enstaka intervall (enstaka mål, noll för andra och tredje mål, noll för det tredje målet i början och slutet av målet) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 Första målavståndet (enhet 0,1 m) D5-D3-avstånd till det andra målet (enhet: 0,1 m) D2-D0 Tredje målavstånd (enhet 0,1 m) 3. Målen är från nära till Fard9 (Bit7-Bit0) Flag Byte: D9 är den sjunde positionen som indikerar huvudvågen; 1: Det finns en huvudvåg, 0: ingen huvudvåg.d9 är den sjätte positionen som indikerar Echo; 1: Det finns Echo, 0: ingen echod9 Den femte positionen indikerar laserstatus; 1: Normal Laser, 0: Laser Faultd9 är den fjärde biten av timeout -flaggan, 1: Normal, 0: TimeOutd9 är ogiltig vid 3: e positionen (inställd på 1); D9 Den andra positionen indikerar APD -statusen; 1: Normal, 0: ErrorD9 är den första positionen att ange om det finns ett tidigare mål; 1: Det finns ett tidigare mål, 0: inget tidigare mål (mål i det blinda området) .d9 Den 0: e biten indikerar om det finns ett efterföljande mål; 1: Det finns ett efterföljande mål, 0: Inget efterföljande mål (målet efter huvudmålet är det efterföljande målet) | 14 byte |
| 11 | 0x02 | Kontinuerligt variering (enstaka mål, noll för de andra och tredje målen, noll för det tredje målet i början och slutet av målet) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 Första målavståndet (enhet 0,1 m) D5-D3-avstånd till det andra målet (enhet: 0,1 m) D2-D0 Tredje målavstånd (enhet 0,1 m) 3. Målen är från nära till Fard9 (Bit7-Bit0) Flag Byte: D9 är den 7: e biten som indikerar huvudvågen; 1: Det finns en huvudvåg, 0: ingen huvudvåg.d9 är den sjätte positionen som indikerar Echo; 1: Det finns Echo, 0: ingen echod9 Den femte positionen indikerar laserstatus; 1: Normal Laser, 0: Laser Faultd9 är den fjärde biten av timeout -flaggan, 1: Normal, 0: Timeoutd9 är ogiltig vid den tredje positionen (inställd på 1); D9 Den andra positionen indikerar APD -tillståndet; 1: Normal, 0: ErrorD9 är den första positionen att ange om det finns ett tidigare mål; 1: Det finns ett tidigare mål, 0: inget tidigare mål (mål i det blinda området) .d9 Den 0: e biten indikerar om det finns ett efterföljande mål; 1: Det finns ett efterföljande mål, 0: Inget efterföljande mål (målet efter huvudmålet är det efterföljande målet) | 14 byte |
| 12 | 0xeb | Nummerfråga | D17 …… D0 | D17 D16 D15 D14 D13 D12 Hela maskinmodellen kodad11D10 Produktnummerd9 D6 Software VersionD5 D4 APD NumberD3 D2 Laser NumberVersion D1 för FPGA | 22 byte |
| Obs: ① Odefinierad databyte/bit, standard är 0; | |||||
Hot Tags: 10 km ögonsäkra laserområdefindermodul (LRF), tillverkare, leverantörer, fabrik, Kina, tillverkad i Kina, anpassad, hög kvalitet
Relaterad kategori
905nm Laser Range Finder Module
1535nm Laser Range Finder Module
1570nm Laser Range Finder Module
1.54UM Laser RangeFinder -modul
1064NM LASER TARGE DESITITATOR
Anti Drone StStem -modul
Ranging Lidar Module
Skicka förfrågan
Lämna gärna din förfrågan i formuläret nedan. Vi kommer att svara dig inom 24 timmar.