Hem
>
Produkter > Laseravståndsmätarmodul > Anti Drone StStem -modul > 2mrad 2km Laser Avståndsmätare modul för Anti drone ststem







2mrad 2km Laser Avståndsmätare modul för Anti drone ststem
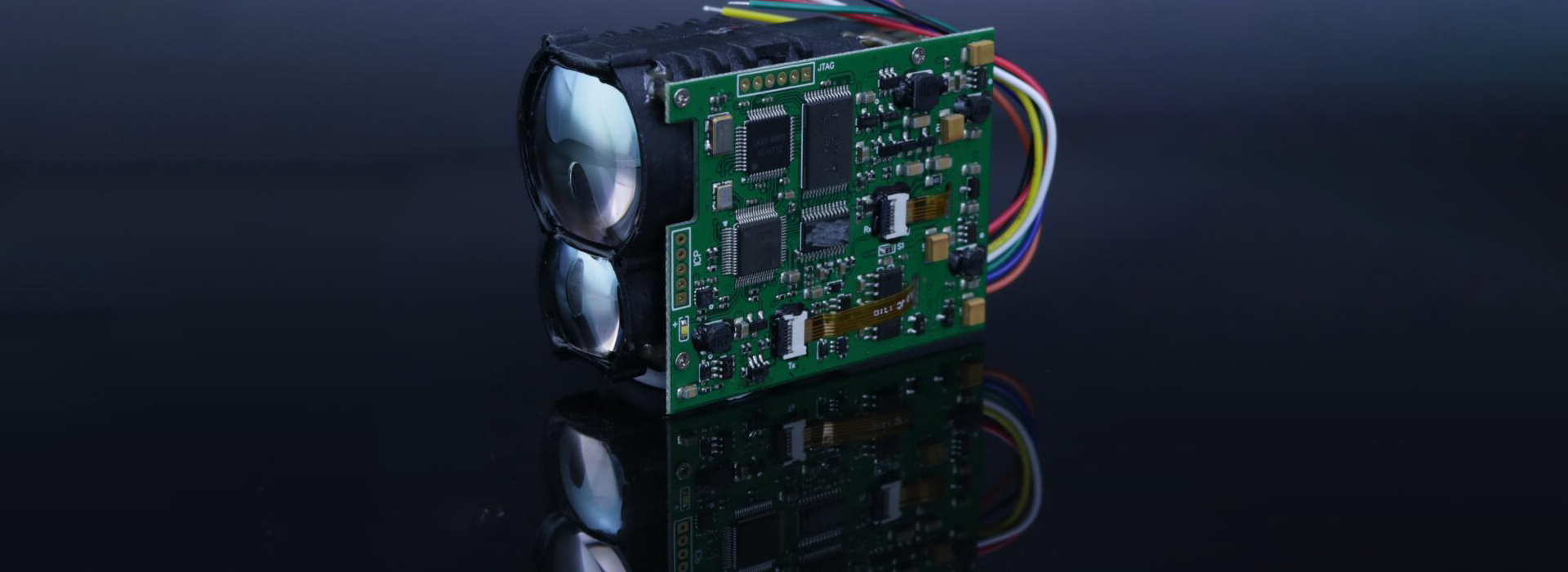
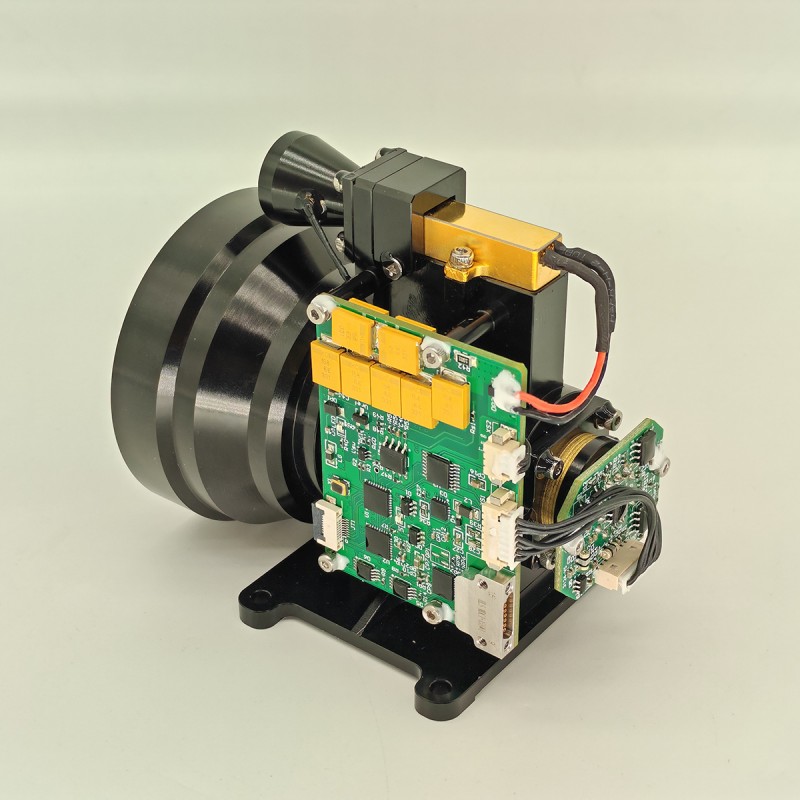
Den kompakta STA-WR2000X laseravståndsmätarmodulen är mycket lämplig för integration i arméns och flottans luftförsvarssystem. Avståndsmätningsmodulen använder den mest avancerade diodpumpade erbiumglaslasern, som har hög tillgänglighet och låg underhållskostnad. Dess 2 mrad divergensvinkel kan mäta UAV:er med ett tvärsnitt på 0,1 ㎡ upp till 2000 meter, vilket gör den till en viktig komponent i antidrönarsystem.
Skicka förfrågan
Produktbeskrivning
1) Enkelt och kontinuerligt avstånd;
2) Svara på laseravståndskommandon och stoppa avståndstagningen när som helst enligt stoppkommandot;
3) Matar ut avståndsdata och statusinformation en gång per puls under avståndsmätning;
4) Den kan rapportera det kumulativa antalet sända laserpulser (ingen förlust av strömavbrott);
5) Avståndsval, före och efter målindikation;
6) Självtestfunktion.
2) Svara på laseravståndskommandon och stoppa avståndstagningen när som helst enligt stoppkommandot;
3) Matar ut avståndsdata och statusinformation en gång per puls under avståndsmätning;
4) Den kan rapportera det kumulativa antalet sända laserpulser (ingen förlust av strömavbrott);
5) Avståndsval, före och efter målindikation;
6) Självtestfunktion.
| Optiskt index | |
| Våglängd | 1535nm±5nm |
| Laser divergensvinkel | ≤2mrad |
| Effektiv mottagningsöppning | 56 mm |
| Avståndsfrekvens | Enkel, 1~10Hz justerbar |
| Räckvidd | Sikt ≥ 12 km, målreflektivitet ≥ 0,3, luftfuktighet ≤ 80 %, UAV-avståndsavstånd (0,25 m × 0,25 m) ≥ 2 km |
| Varierande noggrannhet | ≤±1m(RMS) |
| Noggrannhetsmätning | ≥98 % |
| Falskt larmfrekvens | ≤1 % |
| Minsta mätområde | ≤50m |
| Laseraxelstabilitet | ≤0,05 mrad |
| Den optiska axeln är parallell med installationsreferensen | ≤0,3 mrad |
| Mekaniska indikatorer | |
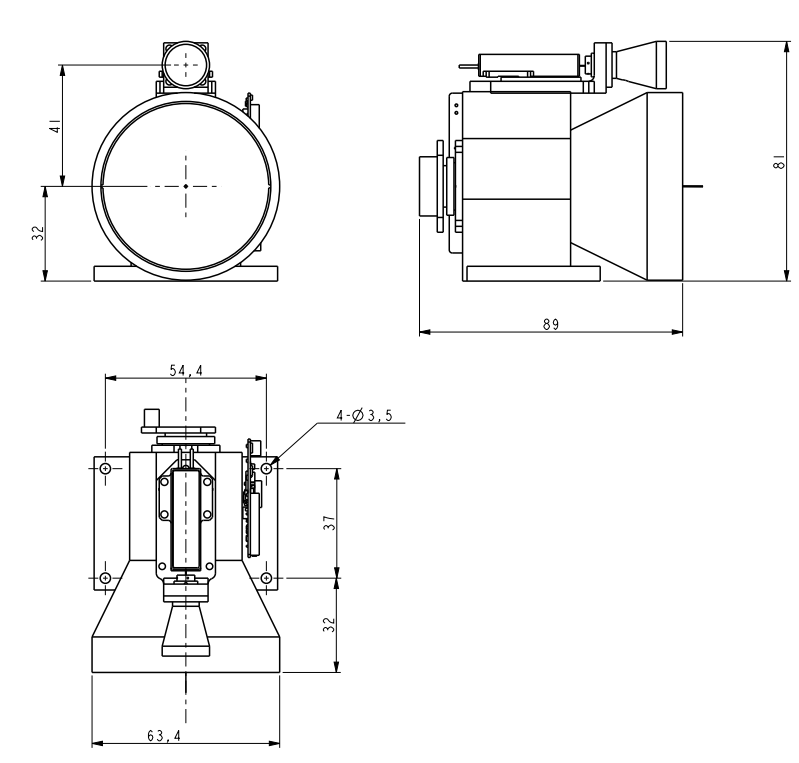
| Storlek | ≤90×63×82 mm |
| Vikt | ≤300g |
| Elektriska indikatorer | |
| Leverera el | DC9V~32V |
| Kraftförlust | Arbeta mindre än 3W@10Hz, toppströmförbrukning mindre än 5W |
| Gränssnitt | RS422-gränssnitt, 115200bps |
| Ström på kontrollgränssnitt | När säkerhetsavståndet är nått, slå på och använd den; eller i lågeffektläge för att kontrollera dess arbetsläge |
| Skydd av kretskort | Efter att designen och felsökningen av kretskortet har slutförts, krävs det att man belägger anti-chockfärgen och gör "tre skydd" -behandlingen |
| Miljömässig lämplighet | |
| Arbetstemperatur | -40℃-65℃ |
| Förvaringstemperatur | -55℃-70℃ |
| Vibrera | GJB150.16 A-2009 "Militär utrustning Laboratoriemiljötestmetoder-Vibrationstest" |
| Surra | GJB150.18 A-2009 "Military Equipment Laboratory Environmental Test Method- Impact Test" |
Notera:
1. Beskrivning av intervallintervall: intervallet kommer att ändras under olika testförhållanden och testmål, om du upptäcker speciella mål, kontakta försäljningssidan för att bekräfta;
2.Minsta räckvidd: 30m-100m fluktuationer, det rekommenderas till 50m efter normal användning; på grund av att laserenergin är stor, kan användning på nära håll bränna detektorchippet, så i felsökningen, ta med ett bra spegelskydd för att förhindra att detektorchipset bränns.
1. Beskrivning av intervallintervall: intervallet kommer att ändras under olika testförhållanden och testmål, om du upptäcker speciella mål, kontakta försäljningssidan för att bekräfta;
2.Minsta räckvidd: 30m-100m fluktuationer, det rekommenderas till 50m efter normal användning; på grund av att laserenergin är stor, kan användning på nära håll bränna detektorchippet, så i felsökningen, ta med ett bra spegelskydd för att förhindra att detektorchipset bränns.
Mekanisk strukturdiagram
Externt gränssnitt
| Stift | Definition | Fungera | Anteckningar |
| 1 | RX+ | RS422-mottagare + | Blå |
| 2 | RX- | RS422-mottagare - | Grön |
| 3 | TX- | RS422 transmission - | Purpur |
| 4 | TX+ | RS422 Transmission + | Gul |
| 5 | GND | Kommunikationsjordledning | Vit |
| 6 | VEE | Strömförsörjning + | Röd |
| 7 | GND | Strömförsörjning - | Svart |
| 8 | PWR EN | / | Aska |
OEM/ODM 1-15 km laseravståndsmodul för Counter Unmanned Aerial Systems (C-UAS)
Kommunikationsprotokoll
1. Överföringsprotokoll: asynkron seriell kommunikation;
2. Porthastighet: 115200;
3. Databitar: 10bitar: en startbit, 8 databitar, en stoppbit, ogiltig verifiering;
4. Datastruktur: Datan består av rubrikbyte, kommandodel, datalängd, parameterdel och kontrollbyte;
5. Kommunikationsläge: huvudkontrollen skickar kontrollkommandon till avståndsmaskinen, och avståndsmaskinen tar emot och utför instruktionerna. I avståndstillståndet skickar avståndsmaskinen data och status för avståndsmaskinen tillbaka till den övre datorn enligt avståndscykeln. Kommunikationsformatet och kommandoinnehållet visas i följande tabell.
A) Huvudkontroll sänder
2. Porthastighet: 115200;
3. Databitar: 10bitar: en startbit, 8 databitar, en stoppbit, ogiltig verifiering;
4. Datastruktur: Datan består av rubrikbyte, kommandodel, datalängd, parameterdel och kontrollbyte;
5. Kommunikationsläge: huvudkontrollen skickar kontrollkommandon till avståndsmaskinen, och avståndsmaskinen tar emot och utför instruktionerna. I avståndstillståndet skickar avståndsmaskinen data och status för avståndsmaskinen tillbaka till den övre datorn enligt avståndscykeln. Kommunikationsformatet och kommandoinnehållet visas i följande tabell.
A) Huvudkontroll sänder
Formatet på meddelandet som ska skickas är som följer:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Tabell 2 Formatbeskrivning av det skickade meddelandet
| ordernummer | namn | förklara | koda | anmärkningar |
| 1 | STX0 | Meddelande startflagga | A5(H) |
|
| 2 | CMD | CW | Se tabell 3 |
|
| 3 | LEN | DL | Antalet alla bytes utom startmärket, kommandoordet och kontrollsumman |
|
| 4 | DATAH | parameter | Se tabell 3 |
|
| 5 | ankomst |
|
||
| 6 | CHK | XOR-verifiering | Förutom den giltiga byten är alla andra byte XORed |
|
Kommandot beskrivs på följande sätt:
Tabell 3 Beskrivning av kommandon och dataord som skickats av befälhavaren till avståndsmaskinen
Tabell 3 Beskrivning av kommandon och dataord som skickats av befälhavaren till avståndsmaskinen
| ordernummer | CW | -55℃-70℃ | databyte | anmärkningar | längd | Exempelkod |
| 1 | 0x00 | upphöra | DATAH=00(H)DATAL=00(H) | Avståndsmätaren slutar mäta | Sex byte | A5 00 02 00 00 A7 |
| 2 | avståndsmodul) | Enkel rangering | DATAH=00(H)DATAL=00(H) |
|
Sex byte | A5 01 02 00 00 A6 |
| 3 | 0x02 | Kontinuerlig rangering | DATAH=XX(H)DATAL=YY(H) | DATA beskriver avståndsperioden, i ms | Sex byte | A5 02 02 03 E8 4E (1Hz-intervall) |
| 4 | 0x03 | självkontroll | DATAH=00(H)DATAL=00(H) |
|
Sex byte | A5 03 02 00 00 A4 |
| 5 | 0x04 | Ställ in det närmaste avståndet till urvalet | DATAH=XX(H)DATAL=YY(H) | DATA beskriver blindzonens värde, enhet 1m | Sex byte | A5 04 02 00 64 C7 (100m är närmaste avstånd) |
| 6 | 0x06 | Kumulativt antal frågor om ljuseffekt | DATAH=00(H)DATAL=00(H) | Kumulativt antal frågor om ljuseffekt | Sex byte | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD-strömmen är på | DATAH=00(H)DATAL=00(H) |
|
Sex byte | A5 11 02 00 00 B6 |
| 8 | 0x12 | APD-strömmen är avstängd | DATAH=00(H)DATAL=00(H) |
|
Sex byte | A5 12 02 00 00 B5 |
| 9 | 0xEB | Nummerfråga | DATAH=00(H)DATAL=00(H) | Nummerfråga | Sex byte | A5 EB 02 00 00 4C |
a) Huvudkontrollen tar emot format
Formatet på det mottagna meddelandet är som följer:
Formatet på det mottagna meddelandet är som följer:
| STX0 | CMD | LEN | DATA | DATUM0 | CHK |
Tabell 4 Formatbeskrivning av mottagna meddelanden
| ordernummer | namn | förklara | koda | anmärkningar |
| 1 | STX0 | Meddelande startflagga 1 | A5(H) |
|
| 2 | CMD_JG | A5 06 02 00 00 A1 | Se tabell 5 |
|
| 3 | LEN | DL | Antalet alla bytes utom startmärket, kommandoordet och kontrollsumman |
|
| 4 | Dn | parameter | Se tabell 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR-verifiering | Förutom den giltiga byten är alla andra byte XORed |
|
Huvudkontrollmottagningsstatusbeskrivning:
Tabell 5 beskriver dataordet som sänds av avståndsmätaren till huvudstyrenheten
Tabell 5 beskriver dataordet som sänds av avståndsmätaren till huvudstyrenheten
| ordernummer | CW | -55℃-70℃ | databyte | anmärkningar | Total längd |
| 1 | 0x00 | upphöra | D1=00(H)D0=00(H) |
|
Sex byte |
| 2 | 0x03 | självkontroll | D8~D1 | D8-D7: -5V spänning, enhet 0,01V.D6-D5: Blindvinkelvärde, enhet 1mD4: APD högspänningsvärde, enhet V;D3: char-typ, som indikerar APD-temperatur, enhet: grader Celsius;D2-D1: +5V spänning, enhet 0,01V | 12 byte |
| 3 | 0x04 | Avstånd till närmaste åtkomstinställning, enhet m | D1 D0 | DATA beskriver närmaste avståndsvärde, enhet 1m;Starta högt och sluta lågt | Sex byte |
| 4 | 0x06 | Kumulativt antal frågor om ljuseffekt | D3~D0 | DATA uttrycker antalet ljus, 4 byte, med den höga byten först | Sju byte |
| 5 | 0x11 | APD-strömmen är på | D1=00(H)D0=00(H) | APD-strömmen är på | Sex byte |
| 6 | 0x12 | APD-ström av | D1=00(H)D0=00(H) | APD-strömmen är avstängd | Sex byte |
| 7 | 0xED | Jobbar övertid | 0x00 0x00 | Lasern är under laserskydd och kan inte mätas. | Sex byte |
| 8 | 0xEE | Effektivitetsfel | 0x00 0x00 |
|
Sex byte |
| 9 | 0XEF | Tidsgräns för serieportkommunikation | 0x00 0x00 |
|
Sex byte |
| 10 | avståndsmodul) | Enstaka avståndsmätning (enkelt mål, noll för det andra och tredje målet, noll för det tredje målet i början och slutet av målet) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 första målavstånd (enhet 0,1m)D5-D3 avstånd till andra mål (enhet: 0,1m)D2-D0 tredje målavstånd (enhet 0,1m)3. Målen är från nära till farD9 (bit7-bit0) flaggbyte:D9 är den 7:e positionen som indikerar huvudvågen; 1: det finns en huvudvåg, 0: ingen huvudvåg. D9 är den sjätte positionen som indikerar eko; 1: det finns eko, 0: inget ekoD9 Den femte positionen indikerar laserstatus; 1: normal laser, 0: laserfelD9 är den fjärde biten i timeoutflaggan, 1: normal, 0: timeoutD9 är ogiltig vid den 3:e positionen (inställd på 1);D9 Den andra positionen indikerar APD-status; 1: normal, 0: errorD9 är den första positionen för att indikera om det finns ett tidigare mål; 1: det finns ett tidigare mål, 0: inget tidigare mål (mål i det blinda området).D9 Den 0:e biten indikerar om det finns ett efterföljande mål; 1: det finns ett efterföljande mål, 0: inget efterföljande mål (målet efter huvudmålet är det efterföljande målet) | 14 byte |
| 11 | 0x02 | Kontinuerlig avståndstagning (enkelt mål, noll för det andra och tredje målet, noll för det tredje målet i början och slutet av målet) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 första målavstånd (enhet 0,1m)D5-D3 avstånd till andra mål (enhet: 0,1m)D2-D0 tredje målavstånd (enhet 0,1m)3. Målen är från nära till farD9 (bit7-bit0) flaggbyte:D9 är den 7:e biten som indikerar huvudvågen; 1: det finns en huvudvåg, 0: ingen huvudvåg. D9 är den sjätte positionen som indikerar eko; 1: det finns eko, 0: inget ekoD9 Den femte positionen indikerar laserstatus; 1: normal laser, 0: laserfelD9 är den fjärde biten i timeoutflaggan, 1: normal, 0: timeoutD9 är ogiltig vid den 3:e positionen (inställd på 1);D9 Den andra positionen indikerar APD-tillståndet; 1: normal, 0: errorD9 är den första positionen för att indikera om det finns ett tidigare mål; 1: det finns ett tidigare mål, 0: inget tidigare mål (mål i det blinda området).D9 Den 0:e biten indikerar om det finns ett efterföljande mål; 1: det finns ett efterföljande mål, 0: inget efterföljande mål (målet efter huvudmålet är det efterföljande målet) | 14 byte |
| 12 | 0xEB | Nummerfråga | D17…… D0 | D17 D16 D15 D14 D13 D12 Hel maskinmodell kodD11D10 ProduktnummerD9 D6 mjukvaruversionD5 D4 APD-nummerD3 D2 LasernummerVersion D1 av FPGA | 22 byte |
| Obs: ① Odefinierad databyte/bit, standard är 0; | |||||
Hot Tags: 2mrad 2km Laser Avståndsmätare modul för Anti drone ststem, Tillverkare, Leverantörer, Fabrik, Kina, Made in China, Customized, High Quality
Relaterad kategori
905nm Laser Range Finder Module
1535nm Laser Range Finder Module
1570nm Laser Range Finder Module
1.54UM Laser RangeFinder -modul
1064NM LASER TARGE DESITITATOR
Anti Drone StStem -modul
Ranging Lidar Module
Skicka förfrågan
Lämna gärna din förfrågan i formuläret nedan. Vi kommer att svara dig inom 24 timmar.