Hem
>
Produkter > Laseravståndsmätarmodul > 1535nm Laser Range Finder Module > 1535nm 3km miniatyrlaseravståndsmodul








1535nm 3km miniatyrlaseravståndsmodul
STA-AM30X laseravståndsmätningsmodul använder Time-of-Flight (TOF) teknologi för att uppnå exakta avståndsmätningar från 10 meter till 4000 meter. Den stöder en avståndsfrekvens på 1Hz till 10Hz och har ett UART (TTL 3.3V) kommunikationsgränssnitt. Funktionerna inkluderar avståndsavstånd i ett skott, kontinuerlig avståndsavstånd, första/sista måligenkänning och avståndsavstånd för flera mål, vilket gör den lämplig för avståndsmätningsapplikationer med hög precision.
Skicka förfrågan
Produktbeskrivning
TEKNISKA SPECIFIKATIONER
| Projekt | Prestandaindikatorer | |
| Modell | STA-AM30X | |
| Prestandaindikatorer | Laser våglängd | 1535±5nm |
| Ögonsäkerhet | Klass Ⅰ (IEC 60825-1) | |
| Divergensvinkel | ≤0,6 mrad | |
| Laser energi | ≥100 μJ | |
| Synfält (FOV) | ~ 7. 4mrad | |
| Maximalt mätområde (sikt > 8 km) | ≥ 4000m @60 % reflektivitet, byggnadsmål | |
| ≥3000m @30% reflektivitet, 2,3×2,3m mål | ||
| ≥1500m @30% reflektivitet, 0,5×1,7m mål | ||
| ≥800m @30% reflektivitet, 0,2×0,3m mål | ||
| Minsta räckvidd | ≤10 m | |
| Varierande frekvens | 1Hz ~10Hz | |
| Multi-Target Detection | Upp till 3 mål | |
| Varierande noggrannhet | ±1 m | |
| Noggrannhetsgrad | ≥98 % | |
| Falsk larmfrekvens | ≤1 % | |
| Elektriska specifikationer | Gränssnittstyp | UART(TTL 3,3V) |
| Strömförsörjningsspänning | DC 3~5V | |
| Strömförbrukning i standbyläge (fullt temperaturområde) | ≤10mW (ström på låg låg) | |
| ≤0,8W (Ström på drog högt) | ||
| Driftströmförbrukning (fullt temperaturområde) | 5V.≤0,9W@1Hz | |
| 5V, <1. 5W @ 10Hz | ||
| Högsta energiförbrukning | <3W@5V | |
| Uppstartstid | ≤350ms (efter start, svarstid ≤20ms) | |
| Fysiska egenskaper | Vikt | ≤ 141g |
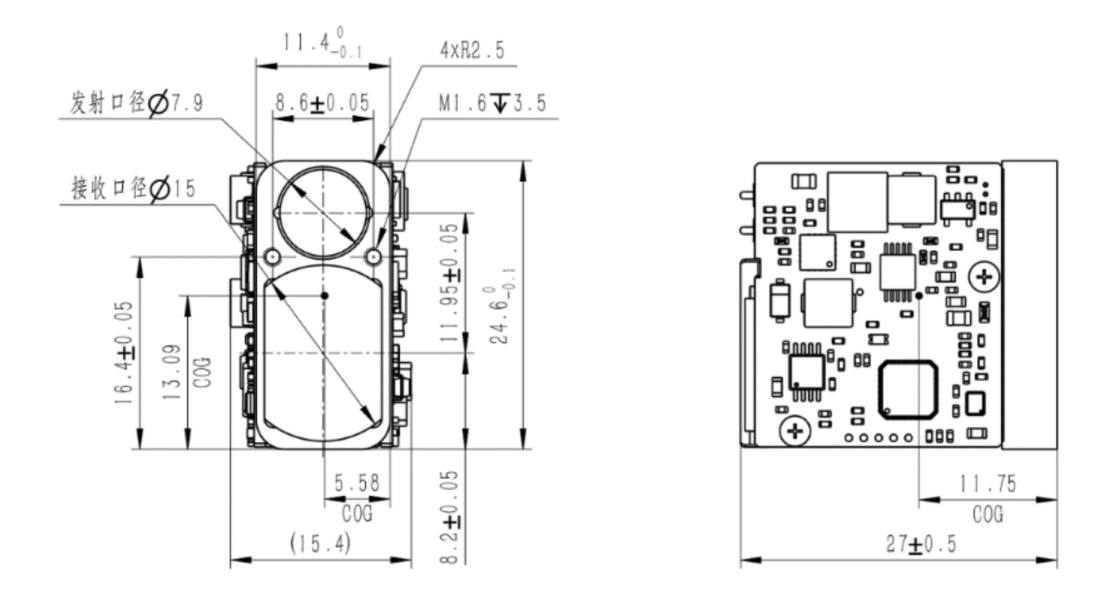
| Mått | ≤ 27×25×15,5 mm (L×B×H) | |
| Chock | 1200g, 1ms | |
| Vibration | 5~50~5 Hz, 1 oktav/min, 2,5g | |
| Miljöanpassningsförmåga | Driftstemperatur | -40 ~ +70 ℃ |
| Förvaringstemperatur | -45 ~ +70 ℃ | |
| Pålitlighet | MTBF>1500h | |
KONTINUERA DIMENSION(mm)
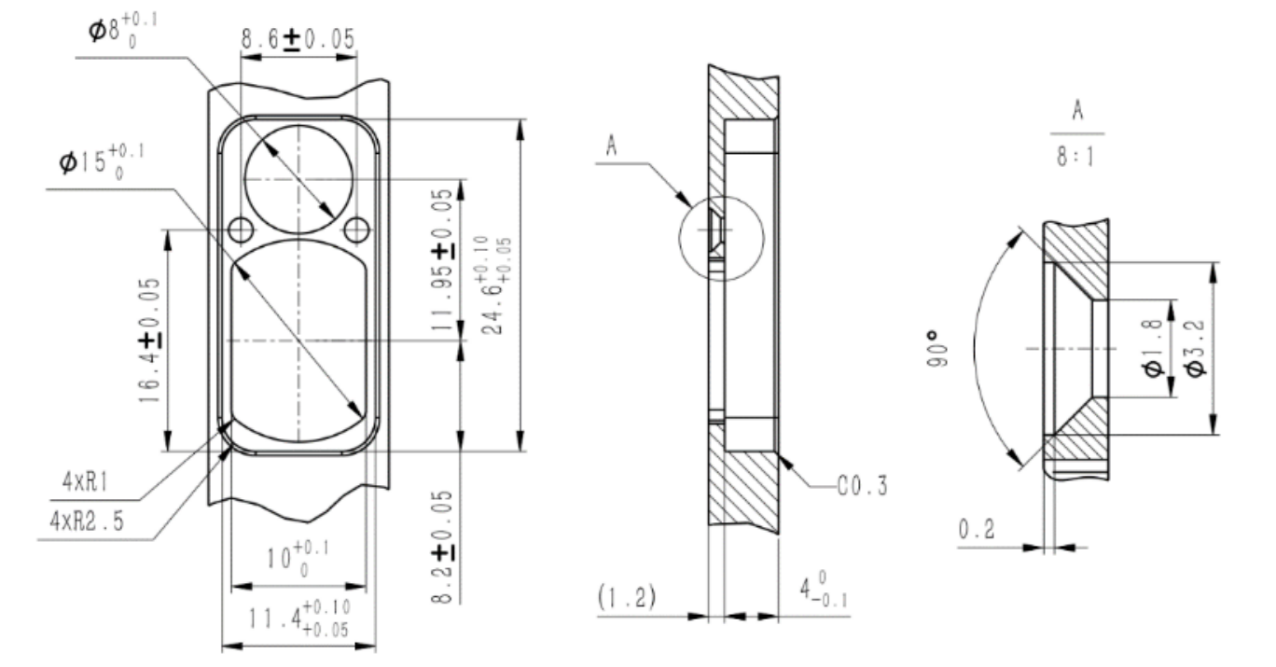
Rekommenderade dimensioner för monteringsfästen är följande:
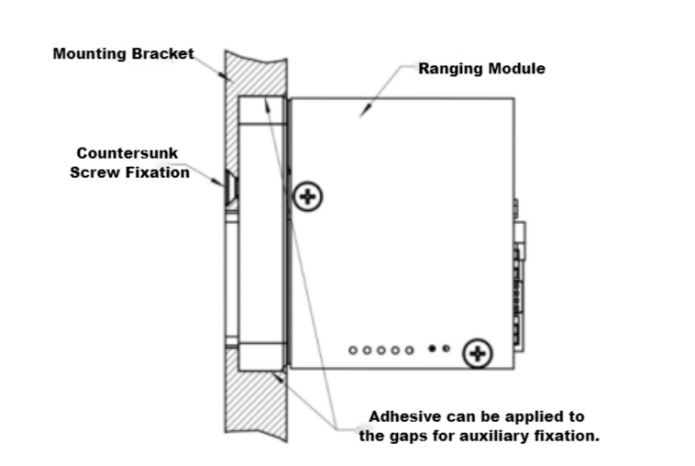
Installationsdiagram:
PIN-gränssnitt
0x01
Anslutningsmodell: FWF08002-S06B13W5M (Tesga-kontakt)
| Stift | Definition | Beskrivning | |
| 1 | POWER_ON | Modulströmbrytare, TTL 3,3V-nivå; Modul på (>2,7V), modul av (<0,3V) | |
| 2 | UART_RX | Seriell portmottagare, TTL 3,3V nivå | |
| 3 | UART_TX | Seriell portsändare, TTL 3,3V nivå | |
| 4 | NC | ||
| 5 | Power Positiv | Strömförsörjning, 3~5V | |
| 6 | GND | Serial Port Ground |
Kabeldefinition:
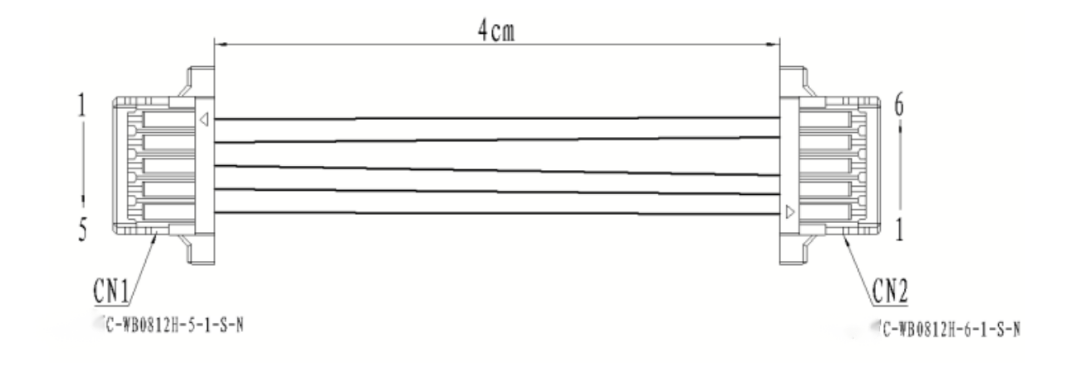
Matchande kabelstift:
| CN1(C-WBO812H-5-1-S-N) | CN2(C-WBO812H-6-1-S-N) | Kabelspecifikationer | Färg |
| 1 | 6 | AWG32 | Svart |
| 2 | 5 | AWG32 | Röd |
| 3 | 3 | AWG32 | Gul |
| 4 | 2 | AWG32 | Grön |
| 5 | 1 | AWG32 | Vit |
Inbäddad programvara
1 Protokollbeskrivning
1.1 Kommunikationshastighet och format
| Format standard | Baudhastighet: 115200bps (fabriksstandard) / 57600bps / 38400bps / 9600bpsByte dataformat: 1 startbit, 8 databitar, 1 stoppbit, ingen verifiering |
1.2 Grundläggande paketformat
| Avsnittsbeskrivning | Sektionslängd (antal byte) | Värdeintervall | Anmärkningar |
| Ramhuvud | 2 | 0xEE 0x16 | Fast värde |
| Datalängd | 1 | 0~4 | Datalängden är det totala antalet byte i de tre delarna: enhetskod, kommandokod och kommandoparametrar |
| Utrustningskod | 1 | 0x03 | Fast värde, LRF S-seriens avståndsmodul |
| Kommandokod | 1 | 0~255 | Indikerar styrobjektet för det aktuella styrkommandot |
| Kommandoparametrar | 0~4 | 0~255 | Indikerar styrobjektets parametrar för det aktuella styrkommandot |
| Kontrollsumma | 1 | 0~255 | Checksumma är summan av all bytedata i de tre delarna av utrustningskod, kommandokod och kommandoparametrar, med de lägre 8 bitarna |
1.3 kontrollkommando (system→avståndsmodul)
| Kommandokod | Förklara | Kommandoparameterbytes |
| avståndsmodul) | Självbesiktning av utrustning | 0 |
| 0x02 | Enkel rangering | 0 |
| 0x03 | Sätt första / sista / flera mål | 1 |
| 0x04 | Kontinuerlig rangering | 0 |
| 0x05 | Sluta sträcka | 0 |
| 0xA0 | Ställ in baudhastighet för laseravståndsmodulen | 4 |
| 0xA1 | Ställ in kontinuerlig avståndsfrekvens | 2 |
| 0xA2 | Ställ in minsta grindavstånd | 2 |
| 0xA3 | Fråga minsta grindavstånd | 0 |
| 0xA4 | Maximalt gating-avstånd | 2 |
| 0xA5 | Fråga det maximala grindavståndet | 0 |
| 0xA6 | Fråga FPGA-programvarans versionsnummer | 0 |
| 0xA7 | Fråga MCU-programvarans versionsnummer | 0 |
| 0xA8 | Fråga hårdvaruversionsnummer | 0 |
| 0xA9 | Fråga Sn-nummer | 0 |
| 0x90 | Totala tider av ljuseffekt | 0 |
| 0x91 | Fråga om strömmen slås på och lyser släckt den här gången | 0 |
1.4 Svarsdata (avståndsmodul→system)
| Kommandokod | Förklara | Kommandoparameterbytes |
| avståndsmodul) | Självbesiktning av utrustning | 4 |
| 0x02 | Enkel rangering | 7 |
| 0x03 | Sätt första / sista / flera mål | 0 |
| 0x04 | Kontinuerlig rangering | 4 |
| 0x05 | Sluta sträcka | 0 |
| 0x06 | Avståndsavvikelse (endast när tillståndet i kommandot för avståndsavvikelse är onormalt, returneras kommandot efter att svarskommandot för enkel eller kontinuerlig avståndsbestämning har returnerats) | 4 |
| 0xA0 | Ställ in baudhastighet för laseravståndsmodulen | 4 |
| 0xA1 | Ställ in kontinuerlig avståndsfrekvens | 2 |
| 0xA2 | Ställ in minsta grindavstånd | 2 |
| 0xA3 | Fråga minsta grindavstånd | 2 |
| 0xA4 | Maximalt gating-avstånd | 2 |
| 0xA5 | Fråga det maximala grindavståndet | 2 |
| 0xA6 | Fråga FPGA-programvarans versionsnummer | 4 |
| 0xA7 | Fråga MCU-programvarans versionsnummer | 4 |
| 0xA8 | Fråga hårdvaruversionsnummer | 4 |
| 0xA9 | Fråga Sn-nummer | 3 |
| 0x90 | Totala tider av ljuseffekt | 3 |
| 0x91 | Fråga om strömmen slås på och lyser släckt den här gången | 3 |
1.5 Driftprocess
efter att avståndsmodulen är påslagen är den i standbyläge som standard. Den måste aktivera modulens strömbrytare (power_on dras upp) i cirka 0,5 s (drivkondensatorn slutför laddningen), och sedan kan alla kommandooperationer i 6.2 nedan utföras.
2 Särskilt avtal
2.1 Självinspektion av utrustning
2.1.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskriva | 0xEE | 0x16 | 0x02 | 0x03 | avståndsmodul) | 0x04 |
2.1.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskriva | 0xEE | 0x16 | 0x06 | 0x03 | avståndsmodul) | Status3 | Status2 | Status1 | Status0 | Check_summa |
| Status3: reservedStatus2: ekointensitet 0x00~0xFFStatus1: bit0 -- FPGA-systemstatus; 1 Normal 0 Exceptionbit1 -- laserljusutgångstillstånd; 1 ljusutgång 0 ingen ljusbit2 -- status för huvudvågsdetektering; 1 huvudvåg 0 ingen huvudvåg 3 -- ekodetektionsstatus; 1 eko 0 inget echobit4 -- förspänningsomkopplarstatus; 1 bias på 0 bias offbit5 -- bias output state; 1 förspänningen är normal 0 bias abnormalbit6 -- temperaturtillstånd; 1 temperaturen är normal 0 temperatur onormal bit7 -- ljusutgång av tillstånd; 1 giltig 0 invalidStatus0: bit0 -- 5v6 effektstatus; 1 normal 0 undantag | ||||||||||
2.2 Enkelavstånd
2.2.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0x02 | 0x05 |
2.2.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskriva | 0xEE | 0x16 | 0x06 | 0x03 | 0x02 | 複数のターゲットの検出 | Intervallvärde heltal högt 8 bitar | Intervallvärde heltal lägre 8 bitar | Varierande värde decimaler | Check_summa |
| När det första/sista målet tas upp: Status: 0x00 indikerar att avståndsresultatet är ett enda mål; 0x01 indikerar att det finns ett främre mål i avståndsresultatet; 0x02 indikerar att det finns ett bakre mål i avståndsresultatet; 0x03 reserverat; 0x04 indikerar att intervallresultatet ligger utanför intervallet; 0x05 reserved;I fall av multi-target rangeing:Status_ bit3~0: 0x0 indikerar att avståndsresultatet är ett enda mål; 0x1 indikerar att det finns ett främre mål i avståndsresultatet; 0x2 indikerar att det finns ett bakre mål i avståndsresultatet; 0x3 indikerar att avståndsresultatet har främre och bakre mål; 0x4 anger att avståndsresultatet ligger utanför intervallet; 0x5 reserved;Status_ bit7~4: 0x0 ~ 0xf indikerar aktuellt avståndsresultatnummer; Värdeområde [0, N-1], antal mål 1 ≤ N ≤ 16; Områdesvärde = områdesvärde heltal högt 8 bitar × 256 + områdesvärde heltal lågt 8 bitar + områdesvärde decimalbitar × 0,1, enhet m | ||||||||||
2.3 Sätt första / sista / flera mål
2.3.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| Beskriva | 0xEE | 0x16 | 0x03(datalängd) | 0x03 | 0x03 | Mål | Check_summa |
| Target:0x01 Ställ in det första målavståndet; 0x02 ställ in terminalmålavstånd; 0x03 ställ in multi-target avstånd; | |||||||
2.3.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0x03 | 0x06 |
2.4 Kontinuerlig mätning
2.4.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0x03 | 0x06 |
2.4.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskriva | 0xEE | 0x16 | 0x06 | 0x03 | 0x04 | 複数のターゲットの検出 | Intervallvärde heltal högt 8 bitar | Intervallvärde heltal lägre 8 bitar | Varierande värde decimaler | Check_summa |
| Vid avståndsavstånd mellan första och sista mål: Status: 0x00 indikerar att avståndsresultatet är ett enda mål; 0x01 indikerar att det finns ett främre mål i avståndsresultatet; 0x02 indikerar att det finns ett bakre mål i avståndsresultatet; 0x03 reserverat; 0x04 indikerar att intervallresultatet ligger utanför intervallet; 0x05 reserved;I fall av multi-target rangeing:Status_ bit3~0: 0x0 indikerar att avståndsresultatet är ett enda mål; 0x1 indikerar att det finns ett främre mål i avståndsresultatet; 0x2 indikerar att det finns ett bakre mål i avståndsresultatet; 0x3 indikerar att avståndsresultatet har främre och bakre mål; 0x4 anger att avståndsresultatet ligger utanför intervallet; 0x5 reserved;Status_ bit7~4: 0x0 ~ 0xf indikerar aktuellt avståndsresultatnummer; Värdeområde [0, N-1], antal mål 1 ≤ N ≤ 16; | ||||||||||
2.5 Sluta avstånd
2.5.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0x05 | 0x08 |
2.5.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0x05 | 0x08 |
2.6 Avvikelse i intervallet
Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| Beskriva | 0xEE | 0x16 | 0x06 | 0x03 | 0x06 | boka | boka | boka | Status1 | Check_summa | |
| Status1: bit0 -- FPGA-systemstatus; 1 normal 0 undantag Bit1 -- laserljusutgångstillstånd; 1 ljusutgång 0 inget ljus Bit2 -- status för huvudvågsdetektering; 1 huvudvåg 0 ingen huvudvåg Bit3 -- ekodetektionsstatus; 1 eko 0 inget eko Bit4 -- förspänningsomkopplarstatus; 1 bias on 0 bias off Bit5 -- bias output state; 1 Förspänningen är normal 0 bias onormal Bit6 -- temperaturtillstånd; 1 Temperaturen är normal 0 onormal temperatur Bit7 -- ljusutgång av tillstånd; 1 giltig 0 är ogiltigDenna instruktion returneras endast när bit0~7 i status1 är onormal. | |||||||||||
2.7 Ställ in baudhastigheten för laseravståndsmodulen
2.7.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskriva | 0xEE | 0x16 | 0x06 | 0x03 | 0xA0 | BaudHigh24 | BaudHigh16 | BaudLow8 | BaudLow0 | Check_summa |
2.7.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Beskriva | 0xEE | 0x16 | 0x06 | 0x03 | 0xA0 | BaudHigh24 | BaudHigh16 | BaudLow8 | BaudLow0 | Check_summa |
2.8 Ställ in kontinuerlig avståndsfrekvens
2.8.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Beskriva | 0xEE | 0x16 | 0x04(datalängd) | 0x03 | 0x0A1 | Frekv | Num | Check_summa |
| Frekvens: 0x01~0x0A Enkel / kontinuerlig avståndsfrekvensNum:0x00 reserv | ||||||||
2.11.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0xA1 | 0xA4 |
2.9 Ställ in minsta grindavstånd
2.9.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Beskriva | 0xEE | 0x16 | 0x04(datalängd) | 0x03 | 0xA2 | MATRÄTT | DIS_L | Check_summa |
| DIS_H: Avstånd hög 8 bitsDIS_L: Avstånd lägre 8 bitsDIS: 10~20000 Minsta grindavståndsområde, i M | ||||||||
2.9.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Beskriva | 0xEE | 0x16 | 0x04(datalängd) | 0x03 | 0xA2 | MATRÄTT | DIS_L | Check_summa |
| DIS_H: Avstånd hög 8 bitsDIS_L: Avstånd lägre 8 bitsDIS: 10~20000 Minsta grindavståndsområde, i M | ||||||||
2.10 Fråga minsta grindavstånd
2.10.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| Beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0xA3 | 0xA6 |
2.10.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Beskriva | 0xEE | 0x16 | 0x04(datalängd) | 0x03 | 0xA3 | MATRÄTT | DIS_L | Check_summa |
| DIS_H: Avstånd hög 8 bitsDIS_L: Avstånd lägre 8 bitsDIS: 10~20000 Minsta grindavståndsområde, i M | ||||||||
2.11 Ställ in maximalt grindavstånd
2.11.1 Skicka till laseravståndsmätningsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| beskriva | 0xEE | 0x16 | 0x04(datalängd) | 0x03 | 0xA4 | MATRÄTT | DIS_L | Check_summa |
| DIS_H: Avstånd hög 8 bitsDIS_L: Avstånd lägre 8 bitsDIS: 10~20000 Minsta grindavståndsområde, i M | ||||||||
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| beskriva | 0xEE | 0x16 | 0x04(datalängd) | 0x03 | Byte | MATRÄTT | DIS_L | Check_summa |
| DIS_H: Avstånd hög 8 bitsDIS_L: Avstånd lägre 8 bitsDIS: 10~20000 Minsta grindavståndsområde, i M | ||||||||
2.12 Fråga maximalt grindavstånd
2.12.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0xA5 | 0xA8 |
2.12.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| beskriva | 0xEE | 0x16 | 0x04(datalängd) | 0x03 | 0xA5 | MATRÄTT | DIS_L | Check_summa |
| DIS_H: Avstånd hög 8 bitsDIS_L: Avstånd lägre 8 bitsDIS: 10~20000 Minsta grindavståndsområde, i M | ||||||||
2.13 Fråga FPGA-programvarans versionsnummer
2.13.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0xA6 | 0xA9 |
2.13.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| beskriva | 0xEE | 0x16 | 0x06 | 0x03 | 0xA6 | Version | Datum | MånÅr | Författare | Check_summa |
| Version: bit7~bit4 Huvudversionsnummer(1~15) bit3~bit0 Mindre versionsnummer(0~15)t.ex.: 0x10——V1.0Data: Datum (1~31) MånÅr: bit7~bit4 månad (1~12)bitar(0~ motsvarande visst år 2020-2035Författare: 0x6c cliu; 0x5d dwu 0xcc cycheng | ||||||||||
2.14 Fråga MCU-programvaruversionsnummer
2.14.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0xAA | 0xAA |
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| beskriva | 0xEE | 0x16 | 0x06 | 0x03 | 0xA7 | Version | Datum | MånÅr | Författare | Check_summa |
| Version: bit7~bit4 Huvudversionsnummer(1~15)bit3~bit0 Mindre versionsnummer(0~15)t.ex.: 0x10——V1.0Data: Datum(1~31)MånÅr: bit7~bit4 månad(1~12))bit3~bitar) Motsvarande visst år(0~1 år 2020-2035 Författare: 0x00 jyang 0xf1 llfu 0x01 zqxiong | ||||||||||
2.15 Fråga hårdvaruversionsnummer
2.15.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0xA8 | 0xAB |
2.15.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| beskriva | 0xEE | 0x16 | 0x06 | 0x03 | 0xA8 | MBVS | CTVS | APDVS | LDVS | Check_summa | |
| MBVS: Moderkorts hårdvaruversionsnummerCTVS: Styrkortets hårdvaruversionsnummerApdvs: detektionskortets hårdvaruversionsnummerLDVS: Drivrutinskortets hårdvaruversionsnummer Bit7 ~ bit4 huvudversionsnummer (1 ~ 15) bit3 ~ bit0 mindre versionsnummer (0 ~ 15) t.ex.:0x10——V1. 0 | |||||||||||
2.16 Fråga Sn-nummer
2.16.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0xA9 | 0xAC |
2.16.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskriva | 0xEE | 0x16 | 0x05 | 0x03 | 0xA9 | MånÅr | APDVS | Num_L | Check_summa |
| Månår: bit7 ~ bit4 månader (1 ~ 12) Bit3 ~ bit0 år (0 ~ 15), motsvarande 2020 ~ 2035Num_ H: Siffran är 8 siffror högNum_ 50: Nedre 8 siffror av NoNum: 1 ~ 999 Nej | |||||||||
2.17 Totala tider för ljuseffekt
2.17.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0x90 | 0x93 |
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskriva | 0xEE | 0x16 | 0x05 | 0x03 | 0x90 | PNUM3 | PNUM2 | PNUM1 | Check_summa |
| PNUM3: totala ljusutgångstider, bit23 ~ bit16PNUM2: totala ljusutgångstider, bit15 ~ bit8PNUM1: totala ljusutgångstider, bit7 ~ bit0 | |||||||||
2.18 Fråga när strömmen slås på och lyser släckt den här gången
2.18.1 Skicka till laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 |
| beskriva | 0xEE | 0x16 | 0x02 | 0x03 | 0x91 | 0x94 |
2.18.2 Retur av laseravståndsmodul:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| beskriva | 0xEE | 0x16 | 0x05 | 0x03 | 0x91 | PNUM3 | PNUM2 | PNUM1 | Check_summa |
| PNUM3: totala ljusutgångstider, bit23 ~ bit16PNUM2: totala ljusutgångstider, bit15 ~ bit8PNUM1: totala ljusutgångstider, bit7 ~ bit0 | |||||||||
3 Instruktionsexempel
| 3.1 Självinspektion av utrustning SKICKA: ee 16 02 03 01 04RECV: ee 16 06 03 01 ff 00 f7 ff f9 | 3.5 Sätt första målet SÄND: ee 16 03 03 03 01 07RECV: ee 16 02 03 03 06 |
| 3.2 EnkelavståndSÄND: ee 16 02 03 02 05RECV: ee 16 06 03 02 04 00 00 00 09 | 3.6 Sätt slutmål SKICKA: ee 16 03 03 03 02 08 RECV: ee 16 02 03 03 06 |
| 3.3 Kontinuerlig intervallSÄND: ee 16 02 03 04 07RECV: ee 16 06 03 04 04 00 00 00 0bRECV: ee 16 06 03 04 04 00 00 00 0bRECV: …… | 3.7 Ställ in flera mål SKICKA: ee 16 03 03 03 03 09 RECV: ee 16 02 03 03 06 |
| 3.4 Stoppa avstånd SEND: för 16 02 03 05 08RECV: för 16 02 03 05 08 | 3.8 Ställ in kontinuerlig avståndsfrekvens 1HzSÄND: ee 16 04 03 a1 01 00 a5RECV: ee 16 02 03 a1 a4 |
| 3.9 Ställ in kontinuerlig avståndsfrekvens 5HzSÄND: ee 16 04 03 a1 05 00 a9RECV: ee 16 02 03 a1 a4 |
Bruksanvisning
1. För att göra det möjligt för operatörerna att säkert och korrekt använda olika funktioner hos miniatyrlaseravståndsmätarprodukten STA-AM30X, ger denna drift- och underhållsmanual instruktioner om dess användning och underhåll. Den är tillämplig på operatörer och underhållspersonal av denna produkt.
STA-AM30X miniatyrlaseravståndsmätare (nedan kallad laseravståndsmätaren) är en optoelektronisk precisionsprodukt som avger laser mot det uppmätta målet och beräknar avståndsinformationen baserat på laserns flygtid. Denna laseravståndsmätare uppnår kommunikation genom kommunikationsgränssnittet Uart (TTL_3.3V) och kännetecknas av enastående prestanda och enkel användning. Lasern i denna avståndsmätare är förbjuden från direkt exponering för mänskliga ögon.
2. Rekommendationer för val och beläggning av optiska fönster
2.1 Materialrekommendationer
Det optiska glaset H-K9L rekommenderas som material för det optiska fönstret. H-K9L är det vanligaste färglösa optiska glaset, lämpligt för laserområdet 300nm till 2100nm. Den har ett högt kostnads-prestandaförhållande och överlägsna fysiska egenskaper.
2.2 Bearbetningsrekommendationer
Det optiska fönstrets kilvinkeltolerans bör vara så liten som möjligt. Det rekommenderas att kilvinkeltoleransen är ≤ 3' (toleransgrad ≤ nivå 7);
Den optiska ytan på det optiska fönstret bör vara så jämn som möjligt. Det rekommenderas att den aritmetiska medelavvikelsen för profilen (Ra) är 0,012.
3.3.3 Självkontrollläge
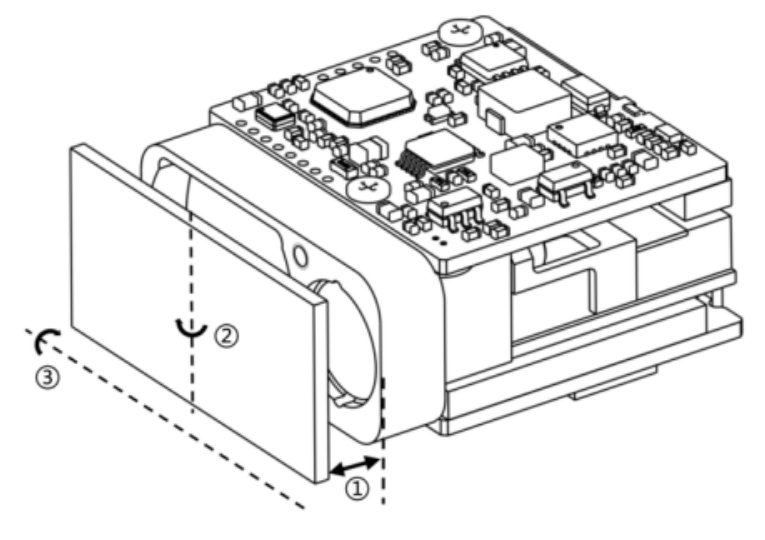
Om hela systemintegrationen använder en fönsterlins, rekommenderas att linsen har en transmittans på >98 % för våglängdsbandet 1535±20nm, med en tjocklek ≤2mm. Avståndet mellan linsen och modulens ändyta ska vara ≤3 mm, girvinkeln ≤1,5° och stigningsvinkeln ≤30°.
För det optiska fönstret för 1535nm laseravståndsmätaren rekommenderas att belägga en antireflekterande film i området 1525nm till 1545nm, med en transmittans på ≥ 99 %.
Beroende på produktens specifika användningsmiljö kan andra skyddsfilmer, såsom en hydrofob film eller en hård film, dessutom väljas för beläggning på det optiska fönstrets yttre yta. För de återstående indikatorerna, se MIL-STD-810G, och transmittansen bör vara ≥ 97 %.
2.4 Rekommendationer för formen och användningen av det optiska fönstret
Den effektiva bländaren för det optiska fönstret beror på olika produkter. Dess yttre dimension bör säkerställa att det optiska fönstrets effektiva öppning - det optiska fönstrets ytterdiameter ≥ 2 mm och ytterdiametern på avståndsmätarantennen - den projicerade dimensionen för det optiska fönstrets effektiva öppning ≥ 1,5 mm. Det schematiska diagrammet visas enligt följande. Eftersom det optiska fönstret har en viss absorption av lasern, rekommenderas att tjockleken på själva det optiska fönstret kontrolleras inom 2 till 4 mm enligt den yttre dimensionen.
Eftersom det optiska fönstret har en hög transmittans, rekommenderas att den axiella avvikelsen mellan den emitterande optiska axeln och normalen för det optiska fönstret kontrolleras inom 0° till 2°. Det schematiska diagrammet över positionen för det optiska fönstret och de två linscylindrarna visas enligt följande. Samtidigt bör luftgapet mellan det optiska fönstret och avståndsmätaren vara så litet som möjligt. Figur 4 visar de schematiska diagrammen över placeringen av det optiska fönstret på två sätt.
Det optiska fönstrets effektiva öppning y2 - ytterdiametern på det optiska fönstret y1>2mm
Den yttre diametern på avståndsmätarantennen3 - projektionsstorleken för den effektiva bländaren för det optiska fönstret y2,>1,5 mm
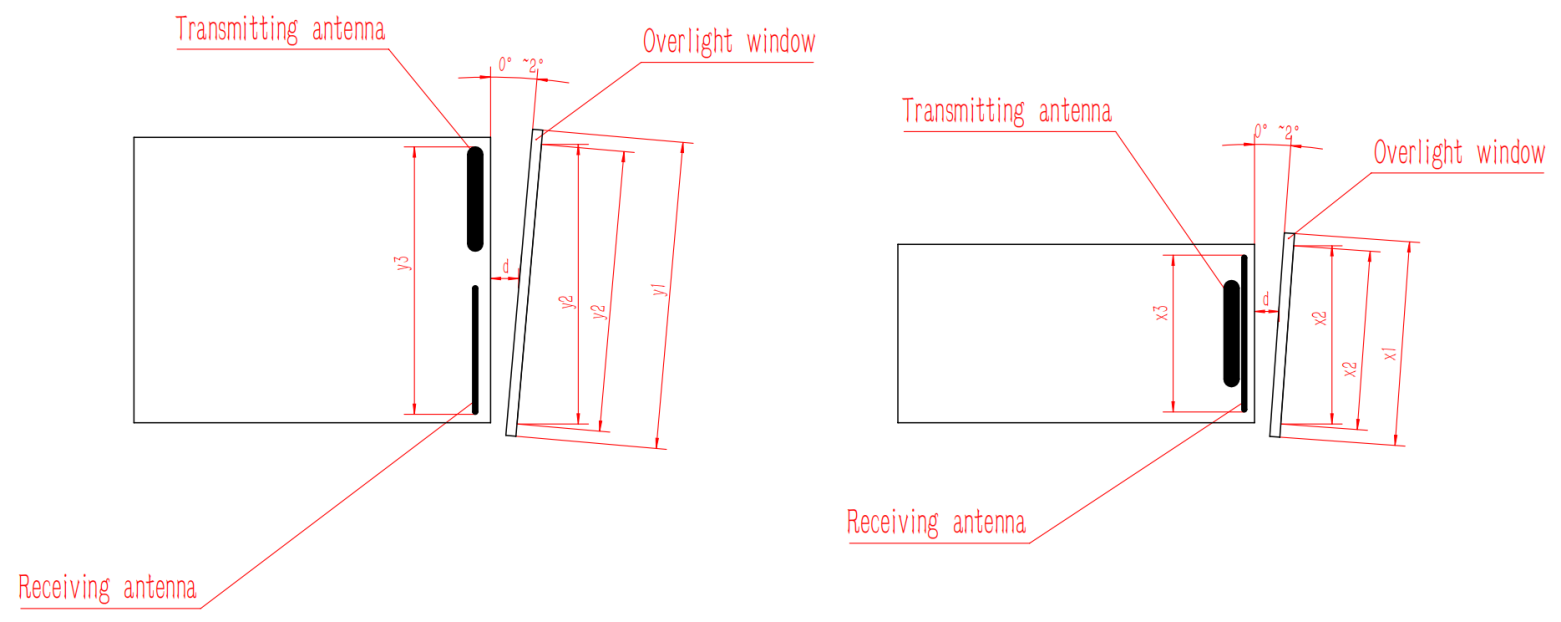
Luftgapet d mellan det optiska fönstret och avståndsmätaren bör vara så litet som möjligt. Det optiska fönstrets effektiva öppning x2 - ytterdiametern på det optiska fönstret x1>2 mm
3.3 Kontinuerlig intervallSÄND: ee 16 02 03 04 07RECV: ee 16 06 03 04 04 00 00 00 0bRECV: ee 16 06 03 04 04 00 00 00 0bRECV: ……
Luftgapet d mellan det optiska fönstret och avståndsmätaren ska vara så litet som möjligt
Schematiska diagram av två sätt för de yttre dimensionerna och placeringen av det optiska fönstret
3. Användning För att du till fullo ska förstå alla funktioner i detta system och korrekt bemästra installation, drift och underhållsmetoder, läs innehållet i detta kapitel noggrant innan du installerar och använder det här systemet.
3.1 Uppstartsdrift
3.1.1 Innan strömmen slås på
Anslut laseravståndsmätaren, felsökningskabeln, DC-strömförsörjningen och värddatorn enligt bilden.
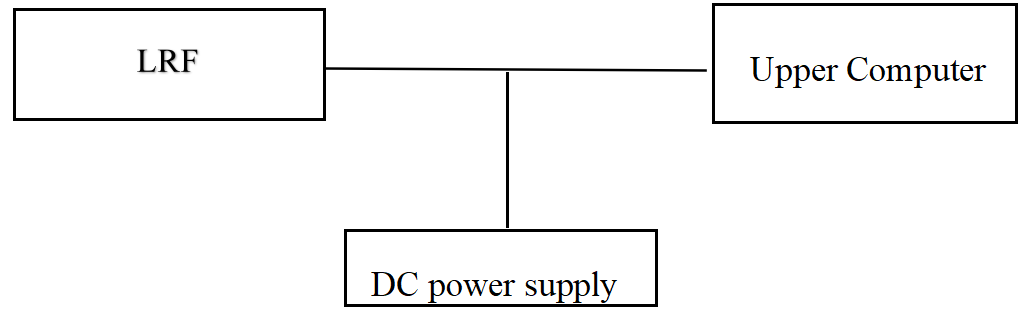
Schematiskt diagram över anslutningen
3.1.2 Ström på
Ström-på-drift: Anslut strömförsörjningen.
3.2 Avstängning
3.2.1 Före avstängning
Innan du stängs av bör det bekräftas att arbetsprocesserna och uppgifterna för varje produkt är i det avslutade tillståndet och att programmet avslutas.
3.2.2 Avstängning
Avstängningssteg: Koppla bort strömförsörjningen.
3.3 Drift
3.3.1 Avståndsläge
Driftsmetod för avståndsläget:
a) Skicka kommandot "Single Ranging" till laseravståndsmätaren. Laseravståndsmätaren utför enkel avståndsmätning och rapporterar avståndsstatus och avståndsvärde.
b) Skicka kommandot "1Hz Ranging" till laseravståndsmätaren. Laseravståndsmätaren utför avståndsmätning en gång per sekund och rapporterar avståndsstatus och avståndsvärde.
c) Skicka kommandot "Stop Ranging" för att stoppa avståndet.
d) Skicka kommandot "5Hz Ranging" till laseravståndsmätaren. Laseravståndsmätaren utför avståndsmätning fem gånger per sekund och rapporterar avståndsstatus och avståndsvärde.
e) Skicka kommandot "Stop Ranging" för att stoppa avståndet.
f) Skicka kommandot "10Hz Ranging" till laseravståndsmätaren. Laseravståndsmätaren utför avståndsmätning tio gånger per sekund och rapporterar avståndsstatus och avståndsvärde.
g) Skicka kommandot "Stop Ranging" för att stoppa avståndet.
3.3.2 Inställning av avståndsgrind
De ompackade produkterna får inte förvaras i det fria i naturen. De bör förvaras i ett lager med en lagringstemperatur på 0℃ till +30℃, en relativ luftfuktighet som inte överstiger 80%, fri från erosion av frätande ämnen, starka mekaniska vibrationer och stötar och starka magnetfält.
Om inställning krävs är operationsmetoden följande:
a) Skicka kommandot "Gating Value Setting" till laseravståndsmätaren.
Skicka kommandot "Ranging" till laseravståndsmätaren. Laseravståndsmätaren kommer att utföra avståndsmätning, avgöra om det återsända avståndsvärdet är större än avståndsgränsvärdet och sedan rapportera avståndsresultatet.
c) Skicka kommandot "Stop Ranging" för att stoppa avståndstagningen. Om avståndsgrindningsfunktionen inte behövs, måste de initiala inställningarna återställas manuellt (ställ in grindningsvärdet till 0).
3.3.3 Självkontrollläge
Funktionsmetoden för självkontrollen:
a) Skicka instruktionen "Självkontrollförfrågan" till laseravståndsmätaren. Laseravståndsmätaren börjar utföra en självkontroll och skickar tillbaka information som aktuell omgivningstemperatur och arbetsstatus.
4. Inspektion och underhåll
4.1 Allmän inspektion
Visuell inspektion och startinspektion bör utföras när produkten används för första gången och efter att resursmodulen har bytts ut. För produkter i normal användning krävs endast inspektion vid start före användning.
4.1.1 Visuell inspektion
Stegen för visuell inspektion är följande:
a) Kontrollera om produktens utseende är normalt;
b) Kontrollera om det är något fel i kabelanslutningen och att anslutningen ska vara stadig.
4.1.2 Inspektion vid start
Stegen för uppstartsinspektion är följande:
a) Slutför driftsättningen enligt stegen i 3.1;
b) Starta självtestmodulen;
c) Efter att inspektionen är klar, slutför strömavstängningen enligt stegen i 3.2.
4.2 Regelbundet underhåll
Laseravståndsmätaren behöver inte underhållas under normala arbetsförhållanden. Underhåll krävs om den förvaras i en dammfri miljö i mer än ett år. Underhållsinnehållet inkluderar:
4.2.1 Allmän inspektion
Utför en allmän inspektion av produkten när den inte är strömsatt. Stegen är som följer:
a) Alla märken och siffror på produkten och testkabelns kontakt (uttag) ska vara korrekta och tydliga;
b) Alla typer av skruvar på panelen ska dras åt;
c) Det bör säkerställas att det inte finns några fästen såsom ljusa fläckar, fläckar, vattenfläckar, mögel, fingeravtryck, dammpartiklar etc. och sprickor som hindrar normal observation på produktens optiska glas sett visuellt.
4.2.2 Inspektion av start
Utför en omfattande inspektion och underhåll av laseravståndsmätaren när den är påslagen. Innehållet inkluderar:
a) Slå på strömmen till produkten i följd;
b) Slutför driftsättningen enligt stegen i 3.1;
3.6 Sätt slutmål SKICKA: ee 16 03 03 03 02 08 RECV: ee 16 02 03 03 06
d) Slutför avstängningen enligt stegen i 3.2.
5. Analys av felsymtom och felsökningsmetoder
Laseravståndsmätaren är en precisionsprodukt. När ett fel uppstår måste hela enheten returneras till fabriken för felanalys, lokalisering och reparation. Självreparation är inte tillåten.
Vanliga felsymptom och felsökningsmetoder visas i följande tabell.
Vanliga felsymtom och felsökningsmetoder
| Fel Symtom | Möjliga orsaker | Inspektionsmetod | Åtgärder för felsökning |
| Produkten kan inte slås på normalt. | a) Fel i matnings- och anslutningskablar.b) Kretsfel. | Kontrollera strömförsörjningen och anslutningskabeln. | a) Byt ut strömförsörjningen eller anslutningskabeln.b) b) Vid kretsfel, kontakta tillverkaren för hjälp med att lösa problemet. |
| Kan inte returnera kommunikationsinformation. | a) Fel på anslutningskabelnb) Onormal strömförsörjningc) c) Kommunikationsfel hos laseravståndsmätaren | a) Kontrollera om anslutningskabeln är normal.b) Kontrollera om strömförsörjningen är normal. | a) Byt ut anslutningskabeln och strömförsörjningen. b) För kommunikationsproblem, kontakta tillverkaren för hjälp med att lösa dem. |
6. Krav på förpackning, transport och lagring
6.1 Förpackning
För de produkter som har lösts upp och behöver fyllas på ska de förpackas enligt originalförpackningen. När produkterna ska returneras till fabriken ska originalförpackningen användas så mycket som möjligt. När andra former av förpackningar används bör det inte orsaka sämre produktprestanda eller skador på produkterna.
3.2 Avstängning
Produkterna som har packats om kan transporteras med hjälp av bilar, tåg, flygplan, fartyg etc. Under transporten bör de förpackade föremålen fästas på transportmedlet för att undvika fenomen som stötar, grov hantering och att utsättas för regn och snö. För vägtransport- och järnvägstransportmiljöer, se MIL-STD-810G.
6.3 Förvaring
De ompackade produkterna får inte förvaras i det fria i naturen. De bör förvaras i ett lager med en lagringstemperatur på 0℃ till +30℃, en relativ luftfuktighet som inte överstiger 80%, fri från erosion av frätande ämnen, starka mekaniska vibrationer och stötar och starka magnetfält.
Säkerhetsföreskrifter
För att kunna använda denna produkt på ett säkert sätt, läs denna bruksanvisning noggrant innan du använder produkten.
l Denna laseravståndsmätare är en optisk och mekanisk precisionsprodukt. Att använda den i strid med föreskrifterna kan leda till farliga laserskador. Öppna eller justera inte någon del av laseravståndsmätaren, och försök inte reparera eller justera laseravståndsmätarens prestanda på egen hand.
l Var uppmärksam på elektrostatiskt skydd: De elektroniska komponenterna i laseravståndsmätaren är känsliga för elektrostatisk urladdning. Rör inte några elektroniska enheter utan skyddsåtgärder.
l Slå endast på strömmen till laseravståndsmätaren för drift inom det specificerade spännings- och effektområdet.
l Det är förbjudet att mäta högreflekterande mål på för nära avstånd (för att förhindra skador på detektorns kärnkomponenter etc.).
l Det är förbjudet att mäta högreflekterande mål på för nära avstånd (för att förhindra skador på detektorns kärnkomponenter etc.).
l Det är förbjudet att förvara laseravståndsmätaren under ospecificerade förhållanden (såsom en mycket förorenad miljö, överskridande av lagringstemperaturområdet, etc.).
l Det är förbjudet att laseravståndsmätaren utsätts för kraftiga mekaniska stötar (vibrationer, stötar, fall etc.).

OEM/ODM 1-90km LRF-modul
Shenzhen Jiguang Technology Co., Ltd
E-post: sales@jioptics.com
Webbplats:www.jioptics.com
Adress: 2017 Longcheng Avenue, Longgang District, Shenzhen
Hot Tags: 1535nm 3km miniatyrlaseravståndsmodul, tillverkare, leverantörer, fabrik, Kina, tillverkad i Kina, kundanpassad, hög kvalitet
Relaterad kategori
905nm Laser Range Finder Module
1535nm Laser Range Finder Module
1570nm Laser Range Finder Module
1.54UM Laser RangeFinder -modul
1064NM LASER TARGE DESITITATOR
Anti Drone StStem -modul
Ranging Lidar Module
Skicka förfrågan
Lämna gärna din förfrågan i formuläret nedan. Vi kommer att svara dig inom 24 timmar.