Hem
>
Produkter > Laseravståndsmätarmodul > 1064NM LASER TARGE DESITITATOR > 45MJ Laser Target Designator (LTD) WIHT LRF




 WIHT LRF")
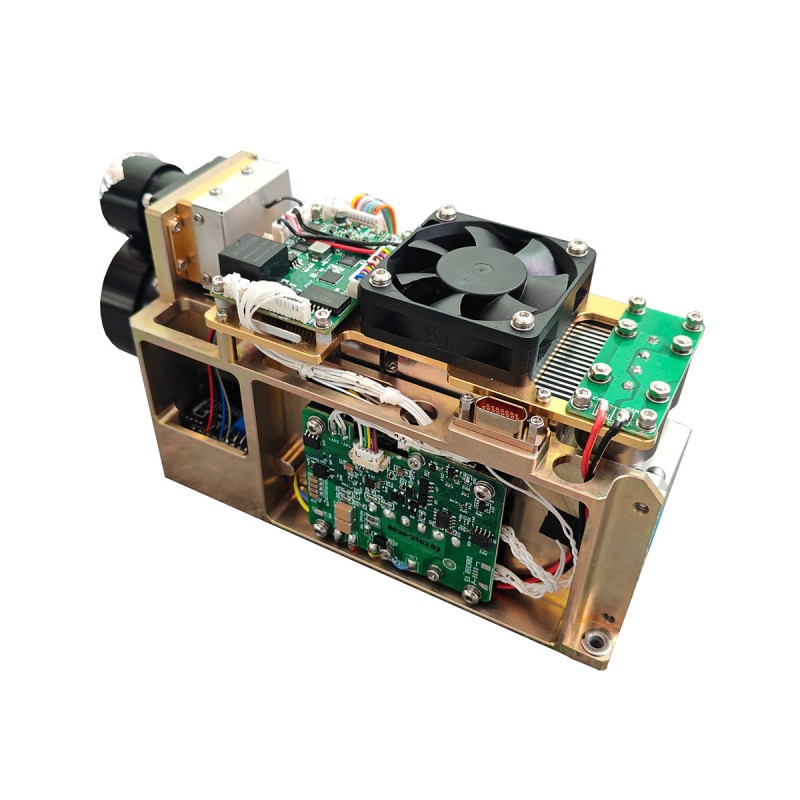
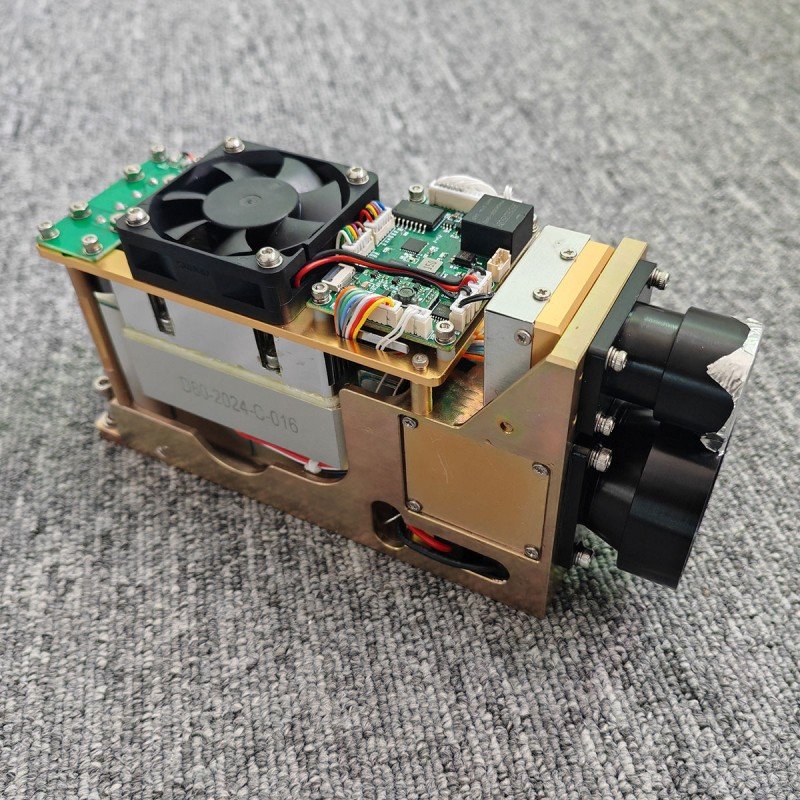
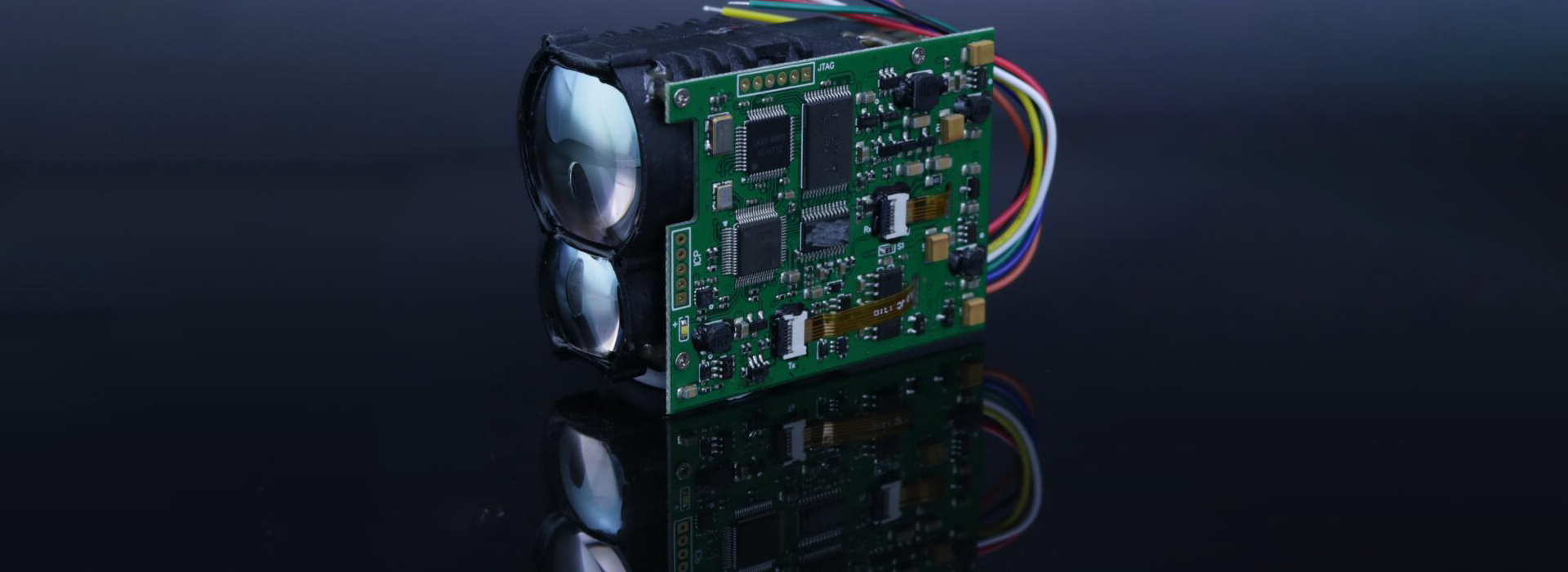
45MJ Laser Target Designator (LTD) WIHT LRF
STA-B45M är en militär 45MJ Laser Target-designer som spelar en avgörande roll i precisionssystem som kan ge exakt vägledning för smart ammunition. Genom ett avancerat optiskt system markerar det målet med en laserstråle, vilket säkerställer att precisionsstyrda vapen kan förstöra målet med extremt hög noggrannhet och effektivitet.
Skicka förfrågan
Produktbeskrivning
Produktfunktioner
Lätt och miniatyr
Miljöanpassningsbarhet: -40 ℃ ~ 60 ℃ Bred temperaturanpassningsförmåga
Miljöanpassningsbarhet: -40 ℃ ~ 60 ℃ Bred temperaturanpassningsförmåga
Kärnindikatorparametrar
Fungera
A) Den har funktionen att ställa in bestrålningscykeln och kan utföra laserbestrålning enligt den inställda cykeln.
b) utrustad med lasersingel och upprepade funktioner.
C) utrustad med flera målfunktioner.
d) utrustad med temperaturutgångsfunktion för kamerans kärnkomponenter.
e) utrustad med överhettningsskyddsfunktion för mätanordningen.
f) Utrustad med funktionen för att utföra statusinformation för belysningsanordningen.
A) Den har funktionen att ställa in bestrålningscykeln och kan utföra laserbestrålning enligt den inställda cykeln.
b) utrustad med lasersingel och upprepade funktioner.
C) utrustad med flera målfunktioner.
d) utrustad med temperaturutgångsfunktion för kamerans kärnkomponenter.
e) utrustad med överhettningsskyddsfunktion för mätanordningen.
f) Utrustad med funktionen för att utföra statusinformation för belysningsanordningen.
Tekniska parametrar
| Modell | STA-B6445M |
| Laservåglängd | 1.06UM (med ND: YAG Crystal, Design Selection Garanti) |
| Laser genomsnittlig energi | ≥ 45MJ (energifluktuationer ≤ ± 8%); |
| laseravvikelsevinkel | 0,5 mad |
| Laserutsläpp Optisk axelstabilitet | ≤ 0,05 mad |
| Laserutsläpp Optisk axel och installationen av basplanet är inte parallellt | ≤ 3 '(designgaranti); |
| Laserpulsbredd | 10ns ~ 22ns |
| Max Ranging | Synlighet ≥ 12 km, maximalt intervall för mätning av NATO -mål ≥ 6 km; |
| Mini | 100 m |
| Alltför upprepad frekvens | 1Hz/5Hz/singel |
| Alltför noggrannhet | ≤ ± 2M (RMS) |
| alltför noggrannhet | ≥ 98% |
| Distansupplösning | ≤ 50 m |
| Kontinuerlig arbetstid | 5 min (5Hz: Kontinuerligt arbete 5 min, vila ≤ 3min, kan fortsätta att sträcka sig). |
| Maximalt bestrålningsavstånd | ≥ 5 km |
| Minsta bestrålningsavstånd | ≤ 500 m (med systembedömningen) |
| Kontinuerlig bestrålningscykel | 8, varje cykel varar 25s, med 15 -talsintervall; Efter 8 cykler, vilterintervall ≤ 20 min; |
| Laserkodperiod (inställd efter kommunikationsprotokoll) | Inställning av intervallet 40ms ~ 100 ms |
| Laserkodningstimingnoggrannhet | ≤ ± 2μs |
| Laserstarttid | ≤3min |
| Extra-kodsynkroniseringsfunktion | Ja |
| Arbetstemperatur: | -40 ~+60 ℃ |
| Lagringstemperatur | -50 ~+70 ℃ |
| Vikt | ≤580 g |
| Modul till dig | 138x75x50mm |
| med mätmätningsförmåga med flera mål och returnera tre multi-målvärde, med selektiv passfunktion. | |
Förberedelse för användning
Kontrollera om strömförsörjningsspänningen är mellan 18V och 32V. När spänningen är för låg (mindre än 18V) kan RangeFinder inte kommunicera korrekt eller indikera "ingen laserutgång", och när spänningen är för hög (mer än 32V) kan hela belysaren skadas permanent. Se till att den nominella utgångsströmmen för strömförsörjningssystemet är större än 6A, om det är mindre än detta värde, kan det inte finnas någon laser under drift. Se till att kraftförsörjningen är korrekt ansluten, det finns en risk för skador på utrustningen om polariteten vänds. Se bilaga A för definitioner av strömförsörjningsuttag.
Försiktighetsåtgärder för användning
A) Laseren som släpps ut av denna avståndsmätare är en 1,06 um säkra våglängdslaser, undvik direkt laserljus för ögonen när du använder.
b) När du justerar parallellen för den optiska axeln, se till att blockera den mottagande linsen, annars skadas detektorn permanent på grund av det starka ekot.
c) Denna RangeFinder-modul är icke-lufttät, se till att använda miljön relativ fuktighet är mindre än 80%och se till att användningen av miljörenlighet och hygien, för att inte skada lasern.
d) RangeFinder -intervallet är relaterat till den atmosfäriska synligheten och målet på målet, i fallet med dimma, regn och vind och sandstråle kommer att minska intervallet. Mål som gröna bladkluster, vita väggar och exponerad kalksten har bättre reflektivitet och kan öka intervallet. Dessutom kommer en ökning av lutningen av målet till laserstrålen att minska intervallet.
e) Det är strikt förbjudet att avfyra laserstrålen med starkt reflekterande mål som glas och vita väggar inom 100 meter för att undvika starka ekon, vilket kan orsaka skador på APD -detektorn.
f) Det är strikt förbjudet att koppla ur eller ansluta kabeln medan den är aktiverad.
g) Se till att kraftpolariteten är korrekt ansluten, annars kommer det att leda till permanent skada på enheten.
b) När du justerar parallellen för den optiska axeln, se till att blockera den mottagande linsen, annars skadas detektorn permanent på grund av det starka ekot.
c) Denna RangeFinder-modul är icke-lufttät, se till att använda miljön relativ fuktighet är mindre än 80%och se till att användningen av miljörenlighet och hygien, för att inte skada lasern.
d) RangeFinder -intervallet är relaterat till den atmosfäriska synligheten och målet på målet, i fallet med dimma, regn och vind och sandstråle kommer att minska intervallet. Mål som gröna bladkluster, vita väggar och exponerad kalksten har bättre reflektivitet och kan öka intervallet. Dessutom kommer en ökning av lutningen av målet till laserstrålen att minska intervallet.
e) Det är strikt förbjudet att avfyra laserstrålen med starkt reflekterande mål som glas och vita väggar inom 100 meter för att undvika starka ekon, vilket kan orsaka skador på APD -detektorn.
f) Det är strikt förbjudet att koppla ur eller ansluta kabeln medan den är aktiverad.
g) Se till att kraftpolariteten är korrekt ansluten, annars kommer det att leda till permanent skada på enheten.
Definition av gränssnittsuttag
Tabell 1 Definition av externa gränssnitt
Tabell 1 Definition av externa gränssnitt
| Ordernummer | Gränssnittstyp | Pigment | Definition | Anmärkningar |
| 1 | DB9 -gränssnittsdefinition | Palm | Rs422 T+ | Rs422 kommunikationsgränssnitt |
| 2 | Purpur | Rs422 t- | ||
| 3 | Gul | Rs422 r- | ||
| 4 | Grön | Rs422 R+ | ||
| 5 | Vit | Gard | ||
| 6 | Aska | Extern avtryckare- | Rs422 -nivå | |
| 7 | Blå | Extern trigger + | ||
| 8 | Definition av kraftgränssnitt | Svart | Vcc+ | DC 18V ~ 32V |
| 9 | Röd | Vcc- |
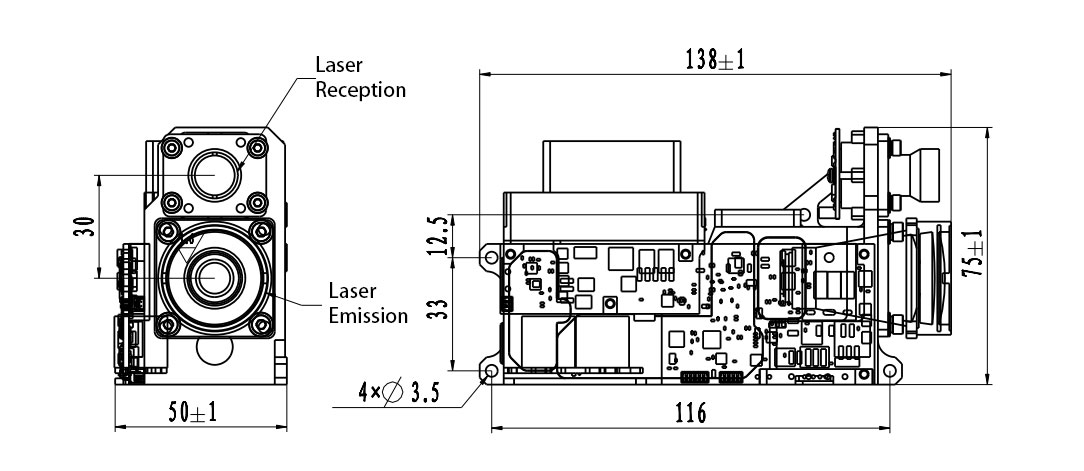
Figur 2 Två-dimensionellt storleksdiagram över produkten
Gränssnittskommunikationsprotokoll
1. Kommunikationsformat:
a) Standardbaudhastigheten är 115200 bps.
b) Dataformat: 8-bitars data, en startbit, en stoppbit, ingen paritetskontroll, data består av rubrikbyte, kommandodel, datalängd, parameterdel och kontrollbyte.
2. Kommunikationsläge:
a) Mästaren och mätanordningen använder master-slav-kommunikationsläget, där befälhavaren skickar kontrollkommandon till mätanordningen och mätanordningen tar emot och kör instruktionerna. I det olika tillståndet skickar mätanordningen data och status för mätanordningen tillbaka till den övre datorn enligt den varierade perioden, och kommunikationsformatet och kommandoinnehållet visas i följande tabell.
b) När mästaren har skickat kontrollkommandot svarar mätaren kontinuerligt med tre svarskommandon. Om befälhavaren inte får svarskommandot från mätaren inom tidsgränsen, kommer den att återge den igen.
Formatet för meddelandet som ska skickas är följande
a) Standardbaudhastigheten är 115200 bps.
b) Dataformat: 8-bitars data, en startbit, en stoppbit, ingen paritetskontroll, data består av rubrikbyte, kommandodel, datalängd, parameterdel och kontrollbyte.
2. Kommunikationsläge:
a) Mästaren och mätanordningen använder master-slav-kommunikationsläget, där befälhavaren skickar kontrollkommandon till mätanordningen och mätanordningen tar emot och kör instruktionerna. I det olika tillståndet skickar mätanordningen data och status för mätanordningen tillbaka till den övre datorn enligt den varierade perioden, och kommunikationsformatet och kommandoinnehållet visas i följande tabell.
b) När mästaren har skickat kontrollkommandot svarar mätaren kontinuerligt med tre svarskommandon. Om befälhavaren inte får svarskommandot från mätaren inom tidsgränsen, kommer den att återge den igen.
Formatet för meddelandet som ska skickas är följande
| Stx0 | Cmd | Len | Data1h | Data1l | Chk |
Tabell 2 Format Beskrivning av meddelandet som skickas
| ordernummer | namn | förklara | koda | anmärkningar |
| 1 | Stx0 | Meddelande Start Flagg | 55 (h) |
|
| 2 | Cmd | Cw | Se tabell 3 |
|
| 3 | Len | Dl | Antalet av alla byte utom startmärket, kommandordordet och kontrollsummen |
|
| 4 | Datah | parameter | Se tabell 3 |
|
| 5 | ankomst |
|
||
| 6 | Chk | Xor -verifiering | Förutom den giltiga byten är alla andra byte xored |
|
Kommandot beskrivs på följande sätt:
Tabell 3 Beskrivning av kommandon och dataord som skickas av Mästaren till mätaren
Tabell 3 Beskrivning av kommandon och dataord som skickas av Mästaren till mätaren
| ordernummer | Cw | fungera | Data Byte | anmärkningar | längd | Exempelkod |
| 1 | 0x00 | STOPP (STOPA RANGING ILLUMINATION) | D1 = 00 (H) D0 = 00 (H) |
|
Sex byte | 55 00 02 00 00 57 |
| 2 | 0x01 | Enstaka | D1 = 00 (H) D0 = 00 (H) | Mätanordningen får en enda instruktion, utför en varieringsoperation och laddar upp det olika avståndsvärdet samtidigt; | Sex byte | 55 01 02 00 00 56 |
| 3 | 0x02 | Kontinuerlig | D1 = XX (H) D0 = YY (H) | Enligt den inställda tidsperioden laddas det olika avståndsvärdet kontinuerligt. Data uttrycker den olika perioden, och enheten är MS | Sex byte | 55 02 02 03 E8 BE (1Hz Ranging) |
| 4 | 0x03 | självkontroll | D1 = 00 (H) D0 = 00 (H) |
|
Sex byte | 55 03 02 00 00 54 |
| 5 | 0x04 | Blind zoninställning | D1 = XX (H) D0 = YY (H) | Data beskriver det blinda zonvärdet, enheten 1m, och ställer in avståndsdisplayen i den blinda zonen till 0; | Sex byte | 55 04 02 01 2C 7E (300m är det närmaste avståndet) |
| 6 | 0x06 | Kumulativt antal ljusaffekter | D1 = 00 (H) D1 = 00 (H) | Slå av lagring; | Sex byte | 55 06 02 00 00 51 |
| 7 | 0x31 | Ställ in den exakta koden | D4 D3 ~ D0 | D4: Exakt kodnummer, inbyggda 8 grupper, numrerade 1 ~ 8; D3 ~ D0 representerar pulsperioden, enhet URSLEG: 45000 ~ 60000 | Nio byte | 55 31 05 01 00 00 C3 50 F3 (exakt kodnummer: 1cykel: 0000C350 = 50000US) |
| 8 | 0x32 | Ställ in variabla intervallkoder | D33 (ref.)D32 (number of coding bits)D31~D30 (time interval between the last bit 0)D29~D28 (time interval between bit 14 and bit 15)D27~D26 (time interval between bit13 bit14)D25~D24 (time interval between bit 12 and bit 13)D23~D22 (time interval between bit11 bit12)D21~D20 (time interval between bit10 bit11)D19~D18 (time interval between bit9 bit10)D17~D16 (time interval between bit8 bit9)D15~D14 (time interval between bit7 bit8)D13~D12 (time interval between bit6 and bit7)D11~D10 (time interval between bit5 bit6)D9~D8 (time interval between bit4 bit5)D7~D6 (time interval between bit3 bit4) d5 ~ d4 (tidsintervall mellan bit2 bit3) d3 ~ d2 (tidsintervall mellan bit1 bit2) d1 ~ d0 (tidsintervall mellan bit0 och bit1) | D33: Variabelt intervallkodnummer, inbyggda 16 grupper, antalet är 1 ~ 16; D32: Antal kodande bitar, allt från 3 till 16 tidsintervallenhet UsRange: 45000 ~ 60000 | 38 byte |
|
| 9 | 0x33 | Inställning av pseudo-slumpmässiga koder | D4 D3 ~ D0 | D4: Pseudo-slumpmässig kodkodning, med 2 inbyggda grupper, numrerade från 1 till 2; d3: längd på pseudo-slumpmässig kod, allt från 2 till 16d2 d1: initialvärde på pseudo-slumpmässig kod, som tas från den nedre biten enligt längden på pseudo-random-kodad0: standby, set 0 | Nio byte | 55 33 05 01 10 AA AA 00 72 (pseudo-slumpmässig kodnummer: 1Pseudo Slumpmässig kodlängd: 16 Initial Value: AAAA) |
| 10 | 0x41 | Ställ in frågan för precisionskoder | D1 d0 | D1: Precise Code Number, Number Range är 1 ~ 8d0: Standby, Set 0 | Sex byte | 55 41 02 01 00 13Set Frågan för precisionskod 1 |
| 11 | 0x42 | Ställ in frågan för variabla intervallkoder | D1 d0 | D1: Variabel intervallkodnummer, antalet är 1 ~ 16d0: Standby, Set 0 | Sex byte | 55 42 02 01 00 14Set Frågan för variabel kodning 1 |
| 12 | 0x43 | Ställ in en fråga för pseudo-slumpmässiga koder | D1 d0 | D1: Pseudo-slumpmässigt kodnummer, antalet är 1 ~ 2d0: Standby, Set 0 | Sex byte | 55 43 02 01 00 15Set Frågan med pseudo-slumpmässig kodning 1 |
| 13 | 0x44 | Kontinuerlig bestrålning Arbetstidsinställning | D1 = 00 (H) D0 = YY (H) | YY kontinuerlig bestrålningstid hänvisar till den kontinuerliga arbetstiden för mätaren under det kontinuerliga bestrålningsläget, enhet s. Det automatiska stoppet stoppas efter timeout | Sex byte | 55 44 02 00 3C 2fcontinuerlig arbetstid 60 -talet |
| 14 | 0x45 | Kontinuerlig bestrålning Arbetstidsfråga | D1 = 00 (H) D0 = 00 (H) |
|
Sex byte | 55 45 02 00 00 12 |
| 15 | 0x30 | Exakt kodbestrålning | D3 ~ d0 | D3: Bestrålningsläge, 00 Kontinuerlig bestrålning, 01 Periodisk bestrålning2: 01 Precise Code bestrålningd1: Precise Code NumberD0: Standby 00 | Åtta byte | 55 30 04 00 01 01 00 61CODE 1, Kontinuerlig belysning av exakt kod |
| Bestrålning av variabel intervallkod | D3 ~ d0 | D3: bestrålningsläge, 00 kontinuerlig bestrålning; 01 Periodisk bestrålning2: 02 Variabel intervallkod Irrålningd1: Variabel intervallkod NumberD0: Standby 00 | Åtta byte | 55 30 04 00 02 01 00 62Code 1, variabel intervallkod Kontinuerlig bestrålning | ||
| Extern synkron bestrålning | D3 ~ d0 | D3: 00 Extern synkronisering är endast kontinuerlig belysning2: 03 Extern synkron bestrålning1: 00d0: 00 | Åtta byte | 55 30 04 00 03 00 00 62 | ||
| Pseudo-slumpmässig kodbestrålning | D3 ~ d0 | D3: bestrålningsläge, 00 kontinuerlig bestrålning; 01 Periodisk bestrålning2: 04 Pseudo-slumpmässig kod Irrålningd1: Pseudo-slumpmässig kod NumberD0: Standby 00 | Åtta byte | 55 30 04 00 04 01 00 64Code 1, pseudo-slumpmässig kod Kontinuerlig bestrålning | ||
| 16 | 0x24 | Periodisk bestrålningsparameterinställning | D2 D1 D0 | D2: Antal arbetscyklesd1: Arbetstid per cykel, enhet SD0: vilotid per cykel, i s | Sju byte | 55 24 03 08 14 0A 64 (8 cykler, 20 -talsarbeten och 10 -talet per cykel) |
| 17 | 0x25 | Periodisk bestrålningsparameterfråga | D1 = 00 (H) D0 = 00 (H) |
|
Sex byte | 55 25 02 00 00 72 |
| 18 | 0xeb | Utrustningsnummerfråga | D1 = 00 (H) D0 = 00 (H) |
|
Sex byte | 55 EB 02 00 00 f.Kr. |
| 19 | 0x51 | Felsökningsläge | D1 d0 | D1: 01 Ange felsökningsläge, 00 Avsluta felsökning Moded0: Standby | Sex byte | 55 41 02 01 00 17Enter Debug Mode55 41 02 00 00 16Exit Debug Mode |
|
|
|
|
|
|
|
|
a) Huvudkontroll får format
Formatet för det mottagna meddelandet är som följer:
Formatet för det mottagna meddelandet är som följer:
| Stx0 | Cmd | Len | Data | Datum0 | Chk |
Tabell 4 Format Beskrivning av mottagna meddelanden
| ordernummer | namn | förklara | koda | anmärkningar |
| 1 | Stx0 | Meddelande Start Flag 1 | 55 (h) |
|
| 2 | Cmd_jg | Datakommandomord | Se tabell 5 |
|
| 3 | Len | Dl | Antalet av alla byte utom startmärket, kommandordordet och kontrollsummen |
|
| 4 | Dn | parameter | Se tabell 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | Xor -verifiering | Förutom den giltiga byten är alla andra byte xored |
|
Huvudkontroll Mottagande statusbeskrivning:
Tabell 5 beskriver dataordet som skickas av mätaren till mästaren
Tabell 5 beskriver dataordet som skickas av mätaren till mästaren
| ordernummer | Cw | Funktionsåterkoppling (motsvarande kontrollkommandot mottagen av mätanordningen) | Data Byte | anmärkningar | total längd |
| 1 | 0x00 | STOPP (STOPA RANGING ILLUMINATION) | D1 = 00 (H) D0 = XX (H) | Xx: 00 Normal Stop01 Stop vid hög temperatur02 Stop när försenad | Sex byte |
| 2 | 0x03 | självkontroll | D8 ~ D0C5 ~ C0B2 ~ B0 | D8-D7 (int-typ): -5V spänningsvärde Feedback, enhet 0.01V.D6-D5: Feedback av Blind Spot-inställningsvärde, enhet 1MD4-D3: APD högspänningsåterkoppling, enhet V; D2: Char Type, indikerar den huvudsakliga kontrollmiljön (miljö), enhet: grader celsius; d1-d0: +5v Volage-matning, enhet, enhetsenhet, enhetlig enhet-C4-C4-C4-COT-CONTERAGE FEAL-FAIR-FEAL-FELE-FEAL-FEAL FEACTION FEAL-FAKTERNAGE FEAL-FAKTER FÖREGRING AV ACTIVE-ANVÄNDNING AV ACTERAVENSFAKTFÖRETAG. AC3-C2: Set the feedback of drive current value in unit AC1-C0: temperature control temperature feedback unit 0.1℃B2: Drive temperature control status (8bit)Bit0: 0 temperature control to temperature 1 not reachedBit1: 0 temperature control is normal 1 temperature control is overcurrentBit2: The drive current is normal 1. Drive current overcurrentBit3: The drive voltage is normal 1. Drive voltage overvoltageBit4: The drive current and set value are normal 1 The difference between the drive current and the set value is greater than 5AB1: Drive communication status (measuring the communication status between the main control board and the drive module)0 is normal and 1 is faultBit0: Set whether the current is successfulBit1: Whether the pulse width is set successfullyBit2: Set whether the external trigger is successfulBit3: Whether the driver starts successfullyBit4: Whether the driver stop is successfulBit5: Set whether the internal trigger is successfulBit6: SpareBit7: Drive QueryB0: Temperaturkontrollkommunikationsstatus (kommunikationsstatus mellan huvudkontrollkortet och temperaturkontrollmodulen) 0 är normal och 1 är felbit0: oavsett om temperaturkontrollstart är framgångsrikbit1: huruvida temperaturkontrollstoppet är framgångsriktbit2: huruvida temperaturinställningen är framgångsrikbit3: huruvida temperaturkontrollfrågan är framgångsrik bitbit4: reservbit5: reservbit6: reservbit7: reservdelar | 22 byte |
| 3 | 0x04 | Blind zoninställning, enhet M | D1 d0 | Data beskriver det närmaste avståndsvärdet, enhet 1 m; starta högt och slutar låg | Sex byte (Drop Power Saving) |
| 4 | 0x06 | Kumulativt antal ljusaffekter | D3 ~ d0 | Data uttrycker antalet lampor, 4 byte, med den höga byte först | Åtta byte |
| 5 | 0x31 | Ställ in den exakta koden | D4 D3 ~ D0 | D4: Precise Code Number, Range 1 ~ 8d3 ~ D0 Representerar perioden, enhet URRANGE: 45000 ~ 60000 | Nio byte |
| 6 | 0x32 | Ställ in variabla intervallkoder | D1 d0 | D1 Variabel intervallkod Nummerområde 1 ~ 16d0 00 ställs in framgångsrikt och 01 är inställt misslyckades | Sex byte |
| 7 | 0x33 | Ställ in en pseudo-slumpmässig kod | D1 d0 | D1 pseudo-slumpmässigt kodnummerområde 1 ~ 2d0 00 ställs in framgångsrikt och 01 är inställd misslyckad | Sex byte |
| 8 | 0x41 | Precise Code Cycle Query | D4 D3 ~ D0 | D4: Precise Code Number, Range 1 ~ 8d3 ~ D0 Representerar perioden, enhet uRange: 45000US ~ 60000US | Nio byte |
| 9 | 0x42 | Variabel intervallkodfrågan | D33 (ref.)D32 (number of coding bits)D31~D30 (time interval between the last bit 0)D29~D28 (time interval between bit14 bit15)D27~D26 (time interval between bit13 bit14)D25~D24 (time interval between bit 12 and bit 13)D23~D22 (time interval between bit 11 and bit 12)D21~D20 (time interval between bit 10 and bit 11)D19~D18 (time interval between bit9 and bit10)D17~D16 (time interval between bit8 bit9)D15~D14 (time interval between bit 7 and bit 8)D13~D12 (time interval between bit6 bit7)D11~D10 (time interval between bit5 bit6)D9~D8 (time interval between bit4 and bit5)D7~D6 (time interval between bit3 bit4) d5 ~ d4 (tidsintervall mellan bit2 bit3) d3 ~ d2 (tidsintervall mellan bit1 bit2) d1 ~ d0 (tidsintervall mellan bit0 bit1) |
|
38 byte |
| 10 | 0x43 | Pseudo-slumpmässig kodfråga | D4 D3 ~ D0 | D4: Pseudo-slumpmässig kodkodning, intervall 1 ~ 2d3: Längd på pseudo-slumpmässig kod, allt från 2 till 16d2 D1: Initialvärde på pseudo-slumpmässig kod, som är hämtad från den nedre biten enligt längden på pseudo-slumpmässig kodad0: standby, uppsättning 0 | Nio byte |
| 11 | 0x44 | Kontinuerlig bestrålning Arbetstidsinställning | D1 = 00 (H) D0 = YY (H) | Yy kontinuerlig bestrålningstid, enhet S, timeout stoppar automatiskt | Sex byte |
| 12 | 0x45 | Kontinuerlig exponering Arbetstidfråga | D1 = 00 (H) D0 = YY (H) | Yy kontinuerlig bestrålningstid, enhet S, timeout stoppar automatiskt | Sex byte |
| 13 | 0x24 | Periodisk bestrålningsparameterinställning | D2 D1 D0 | D2: Antal arbetscyklesd1: Arbetstid per cykel, enhet SD0: vilotid per cykel, i s | Sju byte |
| 14 | 0x25 | Periodisk bestrålningsparameterfråga | D2 D1 D0 | D2: Antal arbetscyklesd1: Arbetstid per cykel, enhet SD0: vilotid per cykel, i s | Sju byte |
| 15 | 0xeb | Utrustningsnummerfråga | D15 ~ D0 | D15 ~ D12: Produkt Modeld11 D10: ProduktnumretD9 D8: Software VersionD7 D6: Justera Q NumberD5 D4: Drive NumberD3 D2: Laser NumberD1 D0: FPGA ID | 20 byte |
| 16 | 0x51 | Felsökningsläge | D1 d0 | D1: 01 Ange felsökningsläge, 00 Avsluta felsökning Moded0: Standby | Sex byte |
| 17 | 0x01 | Enstaka | D9D8 D7 D6D5 D4 D3D2 D1 D0B4 B3 B2 B1 | D9 (Bit7-Bit0) Flag Byte: D9 är den sjunde positionen som indikerar huvudvågen; 1: Det finns en huvudvåg, 0: ingen huvudvåg.d9 är den sjätte positionen som indikerar Echo; 1: Det finns Echo, 0: ingen echod9 5: e biten indikerar laserstatus; 1: Normal Laser, 0: Laser Faultd9 är ogiltig (inställd på 0) vid den fjärde positionen; D9 är ogiltig vid den 3: e positionen (inställd på 0); D9 Den andra positionen indikerar APD -tillståndet; 1: Normal, 0: Errord9 är den första positionen som indikerar om det finns ett tidigare mål; 1: Det finns ett mål, 0: Inget mål (målet före huvudmålet är det tidigare målet och målet i det blinda området) .d9 Den 0: e biten indikerar om det finns ett efterföljande mål; 1: Det finns ett mål, 0: Det finns inget mål (målet efter huvudmålet är det efterföljande målet) D8-D6 första målavstånd (enhet 0,1 m) D5-D3-avstånd till det andra målet (enhet 0,1 m) D2-D0 tredje målavstånd (enhet 0,1 m) 3. Målen är från nära till FARB4 och B3 indikerar högtrycksvärden B2 indikerar att drivströmmen VärdeB1 B0 indikerar laserens temperatur | 19 byte |
| 18 | 0x02 | Kontinuerlig | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (Bit7-Bit0) Flag Byte: D9 är 7: e position som indikerar huvudvågen; 1: Det finns en huvudvåg, 0: ingen huvudvåg.d9 är den sjätte positionen som indikerar Echo; 1: Det finns Echo, 0: ingen echod9 5: e biten indikerar laserstatus; 1: Normal Laser, 0: Laser Faultd9 är ogiltig på den fjärde positionen (inställd på 0); D9 är ogiltig vid den 3: e positionen (inställd på 0); D9 Den andra positionen indikerar APD -tillståndet; 1: Normal, 0: ErrorD9 är den första positionen att ange om det finns ett tidigare mål; 1: Det finns ett mål, 0: Det finns inget mål (målet innan huvudmålet är det tidigare målet och målet i det blinda området) .d9 Den 0: e biten indikerar om det finns ett efterföljande mål; 1: Det finns ett mål, 0: Det finns inget mål (målet efter huvudmålet är ett efterföljande mål) D8-D6 första målavstånd (enhet 0,1 m) D5-D3-avstånd till det andra målet (enhet: 0,1 m) D2-D0 tredje målavstånd (enhet 0,1 m) 3. Målen är från nära till FARB4 och B3 indikerar att APD -högtrycksvärdetB2 indikerar att drivströmmen Värdeb1 B0 representerar laserens temperatur | 19 byte |
| 19 | 0x30 | lysande | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (Bit7-Bit0) Flag Byte: D9 är den 7: e biten som indikerar huvudvågen; 1: Det finns en huvudvåg, 0: ingen huvudvåg.d9 är den sjätte positionen som indikerar Echo; 1: Det finns Echo, 0: ingen echod9 5: e biten indikerar laserstatus; 1: Normal Laser, 0: Laser Faultd9 är ogiltig vid position 4 (inställd på 0) D9 är ogiltig vid 3: e positionen (inställd på 0); D9 Den andra positionen indikerar APD -statusen; 1: Normal, 0: ErrorD9 är den första positionen att ange om det finns ett tidigare mål; 1: Det finns ett mål, 0: Inget mål (målet före huvudmålet är det tidigare målet och målet i det blinda området) .d9 Den 0: e biten indikerar om det finns ett efterföljande mål; 1: Det finns ett mål, 0: Det finns inget mål (målet efter huvudmålet är det efterföljande målet) D8-D6 första målavstånd (enhet 0,1 m) D5-D3-avstånd till det andra målet (enhet: 0,1 m) D2-D0 Tredje målavstånd (enhet 0,1 m) 3. Målen är från nära till FARB4 och B3 indikerar att APD -högtrycksvärdetB2 indikerar att drivströmmen Värdeb1 B0 representerar laserens temperatur | 19 byte |
| 20 | 0xec | Ett instruktionsfel | D1 = 00 d0 = 00 | Kameraåterkopplingskommandot är felaktigt | Sex byte |
| 21 | 0xee | Effektivitetsfel | D1 = 00 d0 = 00 | Kameraåterkopplingen är felaktig | Sex byte |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Obs: ① Odefinierad databyte/bit, standard är 0; | |||||
Hot Tags: 45MJ Laser Target Designator (LTD) WIHT LRF, tillverkare, leverantörer, fabrik, Kina, tillverkad i Kina, anpassad, hög kvalitet
Relaterad kategori
905nm Laser Range Finder Module
1535nm Laser Range Finder Module
1570nm Laser Range Finder Module
1.54UM Laser RangeFinder -modul
1064NM LASER TARGE DESITITATOR
Anti Drone StStem -modul
Ranging Lidar Module
Skicka förfrågan
Lämna gärna din förfrågan i formuläret nedan. Vi kommer att svara dig inom 24 timmar.




 WIHT LRF")